Кривая погони
Кривая погони — кривая, представляющая собой решение задачи о «погоне», которая ставится следующим образом. Пусть точка равномерно движется по некоторой заданной кривой. Требуется найти траекторию равномерного движения точки такую, что касательная, проведённая к траектории в любой момент движения, проходила бы через соответствующее этому моменту положение точки .



История
Задача о кривой погони поставлена Леонардо да Винчи и решена Бугером в 1732 году.
Общий случай постановки задачи
Чтобы вывести уравнение линии, выберем системы координат, в которой ось абсцисс проходит через начальное положение точек и , и точка находится в начале системы координат xAy. Отношение постоянных скоростей точек обозначим через k.
Если допустить, что за бесконечно малый промежуток времени точка прошла расстояние , а точка — расстояние , то , согласно поставленному выше условию, получим соотношение , или



- (1)

Далее следует выразить и через x, y и их дифференциалы. По условию, координаты точки должны удовлетворять уравнению касательной к искомой кривой, то есть



Добавляя к этому уравнению заданное условием уравнение траектории движения «убегающего», можно определить из полученной системы уравнения и . После подстановки этих значений в дифференциальное уравнение (1) оно запишется в виде



- .

Постоянные интегрирования могут быть найдены из начальных условий ( при ).


В общем случае для произвольно заданной кривой найти решение полученного уравнения достаточно сложно. Задача существенно упрощается, если рассмотреть простейший случай, когда траектория "убегающего" является прямой.
Простая кривая погони
Простая кривая погони получается в простом случае, когда преследуемая точка движется по прямой линии. Впервые её описал Пьер Бугер в 1732 году. Позднее Пьер Луи де Мопертюи рассмотрел кривую погони для других случаев.
Определение
Пусть точка старта объекта преследования, а — стартовая точка преследователя. Пусть точка движется равномерно со скоростью в каком-нибудь определённом направлении, а точка движется со скоростью , всегда направленной к точке . Траектория точки является простой кривой погони.




Уравнение в декартовых координатах
Пусть

Пусть и точка A движется вдоль оси x. Тогда

- для
- для




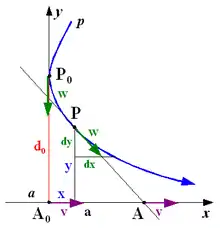
Рассмотрим случай A0(0,0), P0(0,1), при движении «убегающего» вдоль оси x и при k > 0. В произвольный момент времени «убегающий» всегда находится на касательной к кривой траектории движения «преследователя», то есть

на основании чего запишем дифференциальное уравнение:
- , где


Из условия следует , после дифференцирования по времени и , на основании которых:





Запишем выражение для определения длины кривой:

Из
- и


следует

Аналогично проводим дифференцирование по :


Решение с подстановкой
- ,

при разделении переменных приводит к

после интегрирования получаем:

и далее после использования формального определения sinh из получаем:


Повторно интегрируем с определением постоянной интегрирования . Из начальных условий


следует
- ,

а также

получаем:
- или для



или:

На основании этих уравнений можно получить уравнения, приведённые выше.
Свойства
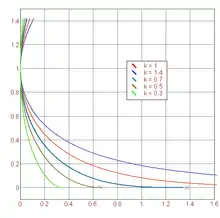
При k > 1 линия погони пересечёт прямую движения «убегающего» и точка P действительно настигнет точку A.
При k ≤ 1 линия погони асимптотически приближается к прямой движения «убегающего» и точка P не настигнет точку A.
При рациональном значении k ≠ 1 линия погони является алгебраической кривой. При k = 1 и при k иррациональном кривая погони становится трансцендентной кривой.
При k = 1 (при одинаковых значениях скоростей «преследователя» и «убегающего») кривая погони напоминает трактрису, однако имеет другое уравнение.
Задача с несколькими преследователями
Практическое применение
Задача построения кривой погони впервые встала при выборе курса судна с учётом внешних факторов (боковых ветров, течения) для оптимального достижения точки цели путешествия.
Вновь эта проблема возникла при использовании в военных целях подводных лодок, торпед, а позднее и управляемых ракет с целью достижения и поражения движущихся целей. Кроме того, кривая погони применяется в космической навигации.
Системы самонаведения ракет
Основной задачей системы самонаведения ракеты считается обеспечение попадания её в цель или перехват цели с минимальным промахом. Поскольку у управляемых ракет имеется возможность изменять траекторию полёта ракеты сразу же после пуска, то существует множество траекторий, при движении по которым самонаводящаяся ракета поразит цель. Но на практике стараются выбрать ту из них, которая при данных условиях стрельбы обеспечивает наибольшую вероятность поражения цели.
Условие, положенное в основу работы системы наведения ракеты, называется методом наведения. Метод наведения определяет теоретическую траекторию движения ракеты. Выбранный метод наведения реализуется, как правило, с помощью вычислительного устройства, которое получает информацию об относительном положении ракеты и цели, о скоростях и направлениях их движения. На основе этой информации вычисляется желательная траектория движения ракеты и определяется наиболее выгодная точка встречи её с целью. По результатам вычислений формируются команды управления, поступающие на рули управления. Рули управляют ракетой по заданному закону. Одним из методов наведения ракет является использование математических зависимостей, которыми описывается кривая погони[1].
Вариации и обобщения
- В более широком понимании, равномерности движения точки не требуется, и именно в таком понимании является кривой погони трактриса.
Примечания
- Куроткин В. И., Стерлигов В. Л. Самонаведение ракет. М.:Военное издательство Минобороны СССР. 1963, 88 с.