Стыковка
Стыковка — процесс (или способ) соединения космических аппаратов (КА) с помощью стыковочного механизма (агрегата стыковки), допускающего в дальнейшем рассоединение (расстыковку) КА и продолжение их полётов по отдельности. При этом осуществляется механическое соединение, достаточно прочное для управления полётом одного аппарата с помощью состыкованного с ним другого. Стыковочный механизм может соединять (и не соединять) электрические схемы и гидравлические системы аппаратов; он может также содержать люк для перехода космонавтов из аппарата в аппарат.
Создание технологии
Проблема стыковки встала перед создателями космических аппаратов вплотную в частности в связи с программой осуществления пилотируемых облётов Луны и высадок на Луну. Первые технически реализуемые предложения по стыковке относятся к 1962 году.
Одной из ступеней к созданию самой технологии стыковки стал Первый групповой полет пилотируемых кораблей который состоялся 12 августа 1962 года с участием корабля «Восток-3» и корабля «Восток-4» выведенным на орбиту спустя сутки[1]. Максимальное сближение кораблей составило порядка 6,5 км.
Стыковка в частности позволяла осуществить полёт пилотируемых экспедиций на Луну — достигалась существенная экономия массы лунного корабля за счёт того, что на Луну садился и с Луны взлетал не весь корабль, а только специальный максимально облегчённый и неспособный к посадке на Землю лунный посадочный модуль корабля. Лунный посадочный и орбитальный модули корабля использовали стыковку в реализованной американской программе «Аполлон» и в неосуществлённой советской программе Л3. Также готовился к полётам вариант корабля «Союз-Контакт» для отработки системы стыковки «Контакт» модулей 7К-ЛОК и ЛК советского комплекса Л3, но в связи с недоведением программы лунного посадочного модуля Л3 до стадии пилотируемых полётов, необходимость полётов «Союза-Контакта» отпала.
Первое в мире сближение двух пилотируемых кораблей было произведено 15 декабря 1965 года кораблями США «Джемини-7» и «Джемини-6A». Максимальное сближение кораблей составило порядка 30 сантиметров.
Первая в мире стыковка была осуществлена 16 марта 1966 года пилотируемым кораблём США «Джемини-8» с ракетной ступенью «Аджена», запущенной 100 минутами ранее.
В апреле 1967 года должна была состояться первая в мире стыковка двух пилотируемых кораблей корабля «Союз-2А» с кораблем «Союз-1», но в связи с неполадками в полете «Союз-1» запуск второго корабля был отменен.
Первая в мире полностью автоматическая стыковка двух космических аппаратов произведена 30 октября 1967 года беспилотными вариантами кораблей «Союз» «Космос-186» и «Космос-188».
.jpg.webp)
Первая в мире стыковка двух пилотируемых кораблей была осуществлена 16 января 1969 года кораблями «Союз-4» и «Союз-5». Переход экипажа из одного корабля в другой осуществлялся путем выхода в открытый космос.[2]
Первая в мире стыковка с переходом экипажа через стыковочный узел была осуществлена в марте 1969 года во время полета «Аполлон-9».
Первая в мире стыковка за пределами земной орбиты была осуществлена в мае 1969 года во время полета «Аполлон-10» на лунной орбите.
Первая в мире стыковка двух пилотируемых кораблей при высадке на Луну была осуществлена в июле 1969 года во время полета «Аполлон-11».
Первая в мире стыковка пилотируемого корабля с космической станцией и переходом экипажа была осуществлена 7 июня 1971 года кораблем «Союз-11» со станцией «Салют-1».
Первая в мире стыковка двух пилотируемых кораблей разных государств была осуществлена в июле 1975 года кораблем США «Аполлон» с кораблем СССР «Союзом-19» в рамках проекта «Союз — Аполлон».
Стыковки очень широко использовались в лунной программе «Аполлон», для создания и снабжения орбитальных станций, как в СССР/России («Салют-ДОС», «Алмаз-ОПС», «Мир»), так и в США («Скайлэб», полеты к станции «Мир»), Китая («Тяньгун-1», «Тяньгун-2») а в настоящее время — Международной космической станции.
Процесс
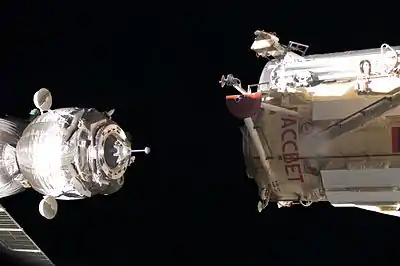
Процессу стыковки предшествует дальнее сближение, затем ближнее, затем с причаливания начинается собственно стыковка. Специальные выступающие элементы стыковочных агрегатов входят в механическое зацепление, после чего начинается стягивание объектов, по окончании которого происходит сцепка замков. В этот момент электро- и гидроразъёмы уже соединены. Далее проверяется герметичность стыка, после чего можно открыть люки и переходить из объекта в объект.
При стыковке объектов большой массы (более массы транспортного корабля класса «Союз» или «Прогресс», близкой к 7 тоннам) стык дополнительно усиливается изнутри съёмными стяжками.
Если получившийся составной объект будет находиться в состыкованном состоянии достаточно долго, то возможен частичный демонтаж стыковочных механизмов и замена их на компактные плоские люки.
Стыковочный агрегат

Стыковочные агрегаты делятся на два больших класса — активно-пассивные и универсальные.
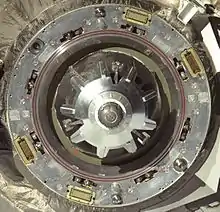
Активно-пассивные стыковочные агрегаты (чаще всего типа «штырь-конус») различаются по конструкции и устройству на двух стыкующихся космических аппаратах. При этом активный корабль не может состыковаться с другим активным, а пассивный — с другим пассивным.[3][4] Примером является российская Система стыковки и внутреннего перехода.
Универсальные стыковочные агрегаты (обычно андрогинно-периферийные) этого недостатка лишены.
Однако, существующие системы с универсальными стыковочными агрегатами (например, АПАС-75, созданный по программе «Союз — Аполлон», и АПАС-89, предполагавшийся для «Бурана», АПАС-95, использовавшийся на станции «Мир», а также использовавшийся на МКС для челноков Шаттл и модулей) уступают по массогабаритным параметрам и требованиям к точности наведения КА более распространённым штырь-конусным системам.
Впервые активно-пассивные стыковочные агрегаты появились на американских КА «Джемини», и предназначались для стыковки с ракетной ступенью «Аджена» с целью отработки процессов сближения и стыковки в рамках программы подготовки к программе «Аполлон».
Ранние активно-пассивные стыковочные агрегаты, установленные на кораблях «Джемини» и кораблях «Союз» с номерами 1, 2 (беспилотный корабль), 3, 4, 5, 7, 8, не имели люка для внутреннего перехода, и космонавтам приходилось выходить в открытый космос в скафандрах. Такая же схема была предусмотрена и в лунном орбитальном 7К-ЛОК и лунном посадочном ЛК модулях корабля-комплекса Л3 советской лунной экспедиции ради экономии массы стыковочного агрегата.
В американской лунной программе «Аполлон» лунные орбитальный и посадочный корабельные модули использовали усовершенствованный стыковочный узел с внутренним переходом.
В СССР стыковочные агрегаты начали разрабатываться по программе 7К-9К-11К, целью которой был пилотируемый облёт Луны без использования тяжёлой ракеты-носителя. Несмотря на то, что программа была отменена, космический корабль «Союз», выросший из проекта 7К, был оснащён активно-пассивным стыковочным агрегатом и системой поиска, сближения и стыковки «Игла», позволившей осуществить первую автоматическую стыковку беспилотных аппаратов. Далее стыковочные агрегаты гражданских («Салют-ДОС», «Мир») и военных («Алмаз-ОПС») орбитальных станций и пилотируемых («Союз») и грузовых («Прогресс» и ТКС) кораблей и модулей к ним были унифицированными и использовали внутренний переход.
Китай освоил технологию андрогинно-периферийной стыковки (автоматической и ручной) для реализации программы национальных космических станций «Тяньгун», посещаемых кораблями «Шэньчжоу» с 2012 года.[5]
Список стыковочных систем
- Андрогинно-периферийный агрегат стыковки: АПАС-75, АПАС-89, АПАС-95. На российских модулях МКС используют систему «штырь-конус» — стыковочные агрегаты системы стыковки и внутреннего перехода (ССВП) для стыковки кораблей «Союз» и «Прогресс» и гибридные стыковочные агрегаты ССВП-М для стыковки модулей, причем ССВП-М имеет стыковочный шпангоут такой же, как у АПАС-95.
- В октябре 2010 года согласован Международный стандарт стыковочной системы (англ. International Docking System Standard, сокр. IDSS)[6][7], в котором используются основные элементы АПАС-95 и LIDS, но они несовместимы.
- Система стыковки НАСА разработана по этому стандарту, другое её название это Стыковочная система слабого столкновения (англ. Low Impact Docking System, сокр. LIDS), разработанная НАСА, которую предполагалось использовать в проекте «Созвездие». Несмотря на то, что эта система является уменьшенной, облегчённой и упрощённой версией АПАС, они несовместимы. Для сопряжения узлов системы АПАС-95 с Системой стыковки НАСА разработан Международный стыковочный адаптер (англ. International Docking Adapter, сокр. IDA).
- Также для стыковки на МКС используется Единый механизм пристыковки англ. Common Berthing Mechanism или (CBM) — эта система используется на H-II Transfer Vehicle, Dragon SpaceX, Cygnus.
- В 2021 году на РС МКС появился стыковочный агрегат АСП-К (на модуле МЛМ и на модуле УМ). Этот агрегат позволяет выполнять стыковку с космическими кораблями с разными по размеру системами ССВП и гибридными ССВП-М за счёт специальной промежуточной технологической проставки.
См. также
- Стыковка и швартовка космического корабля
- Универсальный стыковочный модуль
- Узловой модуль «Причал»
- Стыковочно-грузовой модуль «Рассвет»
- Стыковочный модуль орбитальной станции «Мир»
- Андрогинно-периферийный агрегат стыковки
- Система стыковки НАСА
- Единый механизм пристыковки
- Международный стандарт стыковочной системы
- Система стыковки и внутреннего перехода
- Герметичный стыковочный переходник
- Международный стыковочный адаптер
Примечания
- Первый групповой полет пилотируемых кораблей
- 50 лет первой космической станции: интервью с Борисом Волыновым. Роскосмос (16 января 2019).
- ТЕХНИЧЕСКИЕ АСПЕКТЫ СОВМЕСТИМОСТИ КОСМИЧЕСКИХ СИСТЕМ — К. Д. Бушуев, ПОДГОТОВКА И ОСУЩЕСТВЛЕНИЕ ПРОГРАММЫ ЭПАС // НОВОЕ В ЖИЗНИ, НАУКЕ, ТЕХНИКЕ Серия «Космонавтика, астрономия» № 10, 1976 г.
- Архивированная копия (недоступная ссылка). Дата обращения: 16 декабря 2013. Архивировано 16 декабря 2013 года.
- Эксперты: успешная пилотируемая стыковка космических аппаратов продемонстрировала совокупную мощь Китая в развитии космонавтики, "Жэньминь Жибао" (20 июня 2012). Дата обращения 16 декабря 2013.
- Партнеры по МКС согласовали новый международный стандарт систем стыковки (недоступная ссылка). Дата обращения: 16 декабря 2013. Архивировано 10 мая 2012 года.
- International Docking Standard
Ссылки
- СТЫКОВКИ КОСМИЧЕСКИХ АППАРАТОВ, ДРАМЫ НА ОРБИТЕ И НА ЗЕМЛЕ // Гапонов В. А., Железняков А. Б. Станция «Мир»: от триумфа до…
- Первая в мире полностью автоматическая стыковка двух космических аппаратов
- Стыковка — Большая советская энциклопедия. — М.: Советская энциклопедия. 1969—1978.
- Lunar Orbit Rendezvous and the Apollo Program. NASA. Дата обращения: 16 декабря 2013. Архивировано 9 июля 2013 года.
- PEARSON, DON J. SHUTTLE RENDEZVOUS AND PROXIMITY OPERATIONS (1989). Дата обращения: 16 декабря 2013. Архивировано 9 июля 2013 года.












