Система стыковки НАСА
Система стыковки НАСА (англ. NASA Docking System, сокр. NDS) — международный пассивно-активный стыковочный механизм, который разрабатывается для будущего полета человека в космос на Многоцелевом пилотируемом корабле «Орион» и для коммерческих пилотируемых кораблей. Это первая попытка Многостороннего координационного совета Международной космической станции по практической реализации Международного стандарта стыковочной системы. Система стыковки НАСА также известна как Международная стыковочная система слабого столкновения (англ.) international Low Impact Docking System (iLIDS).[1]
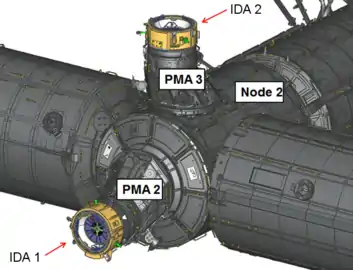
Два Международных стыковочных адаптера (англ. International Docking Adapters, сокр. IDA) присоединены к Герметичным стыковочным переходникам модуля Гармония (другое название модуля Node-2), один — впереди, другой в Зените.[2] эти переходники позволяют соединить АПАС-95 и Систему стыковки НАСА[2].
Конструкция
Система стыковки НАСА андрогинная, первый узел использует технологию Стыковочной системы слабого столкновения, а также позволяет не только быть активным в паре стыкуемых узлов, но и выполнять роль пассивного причала[3]. Он поддерживает как автоматические, так и пилотируемые стыковки. Кроме того имеет возможность пиротехнической (взрывной) расстыковки в особых случаях. Соединённые пары интерфейсов позволяют передавать электроэнергию, данные, команды, воздух и поддерживать телекоммуникационную связь. В будущих реализациях они также смогут передавать воду, топливо, окислитель, а также поддерживать гидравлику.[1] Проход для экипажа и груза имеет диаметр 800 миллиметров (31 ″).[4]
По внешнему виду и функциям Система стыковки НАСА имеет некоторое сходство с системой АПАС-95, механизм которой уже используется на Герметичных стыковочных переходниках (PMA), уже закрепленных на Международной космической станции, но не полностью совместима с ней.
История

В 1996 году Космический центр имени Линдона Джонсона приступил к разработке усовершенствованной системы причала и стыковки,[5] , которую позже будут называть Стыковочная система слабого столкновения X-38.[6][7] Даже после того, как проект X-38 был отменен в 2002 году, разработка системы стыковки продолжилась, но её будущее оставалось неизвестным[5]. НАСА в 2005 году рекомендовало использовать Стыковочную систему слабого столкновения для экипажа исследовательского корабля (который позже был назван «Орион»)[8]. Также, в миссии STS-125, на космический телескоп Хаббл был установлен механизм мягкого захвата. К этому захвату в будущем, когда телескоп Хаббл окончательно выйдет из строя, будет пристыкован космический возвращаемый аппарат, который аккуратно спустит телескоп с орбиты. Механизм мягкого захвата создаёт негерметичную стыковку, но позволяет осуществить захват кораблём «Орион». Стыковочное кольцо было установлено на кормовую переборку Хаббла[9]
В феврале 2010 года программа LIDS стала приводиться к требованиям МССС и стала известна как Международная стыковочная система слабого столкновения, англ. international Low Impact Docking System (iLIDS) или просто Система стыковки НАСА[3]. В мае 2011 года, критический анализ проекта был завершён и к концу 2013 года ожидалось его окончательное утверждение.[2]
IDA-1 являлся частью полезной нагрузки миссии SpaceX CRS-7 в июне 2015 года, но был утрачен, когда ракета Falcon 9 взорвалась во время подъема[10]. IDA-2 был доставлен на МКС миссией SpaceX CRS-9[11]. Адаптер IDA-3 был доставлен на МКС 27 июля 2019 года грузовиком Dragon миссии SpaceX CRS-18[12]
Примечания
- Parma, George Overview of the NASA Docking System and the International Docking System Standard. NASA (20 мая 2011). Дата обращения: 11 апреля 2012. Архивировано 15 октября 2011 года.
- Bayt, Rob Commercial Crew Program: Key Drving Requirments Walkthrough. NASA (26 июля 2011). Дата обращения: 27 июля 2011. Архивировано 28 марта 2012 года.
- NASA Docking System (NDS) Technical Integration Meeting (2010-11-17)
- International Docking System Standard (IDSS) Interface Definitions Document (IDD) Revision D April 2015. International Docking System Standard. ISS Multilateral Control Board. Дата обращения: 31 октября 2015.
- Low Impact Docking System (2009-02)
- Advanced Docking/Berthing System — NASA Seal Workshop (2004-11-04) Архивировано 22 сентября 2011 года.
- Advanced Docking Berthing System Архивировано 26 февраля 2009 года.
- NASA’s Exploration Systems Architecture Study — 5.3.4 Docking Mechanism/ISS Docking Module Trades (November 2005)
- NASA. The Soft Capture and Rendezvous System. NASA (2008). Дата обращения: 22 мая 2009.
- Graham, William SpaceX’s Falcon 9 fails during launch following second stage failure. nasaspaceflight.com (27 июня 2015). Дата обращения: 27 июня 2015.
- Siceloff, Steven More than Two Tons of New Equipment Bound for Station Following Blazing Liftoff. NASA. Дата обращения: 20 июля 2016.
- Stephen Clark. SpaceX’s Dragon cargo capsule arrives at space station – Spaceflight Now (англ.) (27 июля 2019). Дата обращения: 14 декабря 2019.