Квадратная матрица
В математике квадра́тная ма́трица — это матрица, у которой число строк совпадает с числом столбцов, и это число называется порядком матрицы. Любые две квадратные матрицы одинакового порядка можно складывать и умножать.
Квадратные матрицы часто используются для представления простых линейных отображений — таких, как деформация или поворот. Например, если R — квадратная матрица, представляющая вращение (матрица поворота) и v — вектор-столбец, определяющий положение точки в пространстве, произведение Rv даёт другой вектор, который определяет положение точки после вращения. Если v — вектор-строка, такое же преобразование можно получить, используя vRT, где RT — транспонированная к R матрица.
Главная диагональ
Элементы aii (i = 1, …, n) образуют главную диагональ квадратной матрицы. Эти элементы лежат на воображаемой прямой, проходящей из левого верхнего угла в правый нижний угол матрицы[1]. Например, главная диагональ 4х4 матрицы на рисунке содержит элементы a11 = 9, a22 = 11, a33 = 4, a44 = 10.
Диагональ квадратной матрицы, проходящая через нижний левый и верхний правый углы, называется побочной.
Специальные виды
Название Пример с n = 3 Диагональная матрица Нижняя треугольная матрица Верхняя треугольная матрица



Диагональные и треугольные матрицы
Если все элементы вне главной диагонали нулевые, A называется диагональной. Если все элементы над (под) главной диагональю нулевые, A называется нижней (верхней) треугольной матрицей. Треугольная матрица, у которой все диагональные элементы равны 1, называется унитреугольной[2][3].
Единичная матрица
Единичная матрица En размера n — это n×n матрица, в которой все элементы на главной диагонали равны 1, а остальные элементы равны 0 (часто вместо буквы E используют букву I[4])[1]. Таким образом,

Умножение на единичную матрицу оставляет матрицу неизменной:
- {{{1}}} для любой n×n матрицы A.
Симметричные и антисимметричные матрицы
Квадратная матрица A, совпадающая со своей транспонированной, то есть A = AT, называется симметричной. Если же A отличается от транспонированной матрицы знаком, то есть A = −AT, то A называется антисимметричной (или кососимметричной)[4][5]. В случае комплексных матриц понятие симметрии часто заменяют понятием самосопряжённости, а матрицу, удовлетворяющую равенству A∗ = A, называют эрмитовой (или самосопряжённой); здесь звёздочкой обозначена операция эрмитова сопряжения, смысл которой — в замене каждого элемента исходной матрицы комплексно сопряжённым числом с последующим транспонированием полученной матрицы[6][7].
По спектральной теореме для вещественных симметричных матриц и комплексных эрмитовых матриц существуют базисы, состоящие из собственных векторов; таким образом, любой вектор пространства можно представить в виде линейной комбинации собственных векторов. В обоих случаях все собственные значения вещественны[8]. Эту теорему можно распространить на бесконечномерный случай, когда матрицы имеют бесконечно много строк и столбцов.
Обратимые матрицы
Квадратная матрица A называется обратимой или невырожденной, если существует матрица B, такая, что
Если матрица B существует, она единственна и называется обратной к A и записывается как A−1.
Определённая матрица
| Положительно определённая | Неопределённая |
|---|---|
| Q(x,y) = 1/4 x2 + 1/4y2 | Q(x,y) = 1/4 x2 − 1/4 y2 |
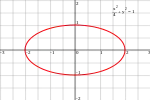 Точки, удовлетворяющие уравнению Q(x,y) = 1 (Эллипс). |
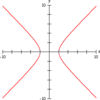 Точки, удовлетворяющие уравнению Q(x,y) = 1 (Гипербола). |


Симметричная n×n матрица называется положительно определённой (соответственно, отрицательно определённой или неопределённой), если для всех ненулевых векторов x ∈ Rn соответствующая квадратичная форма
- Q(x) = xTAx
принимает только положительные значения (соответственно, отрицательные значения или и те, и другие). Если квадратичная форма принимает только неотрицательные (соответственно, только неположительные) значения, симметричная матрица называется положительно полуопределённой (соответственно, отрицательно полуопределённой). Матрица будет неопределённой, если она ни положительно, ни отрицательно полуопределена[11].
Симметричная матрица положительно определена тогда и только тогда, когда все её собственные значения положительны[12]. Таблица справа показывает два возможных случая для матриц 2×2.
Если использовать два различных вектора, получим билинейную форму, связанную с A:
- BA (x, y) = xTAy[13].
Ортогональная матрица
Ортогональная матрица — это квадратная матрица с вещественными элементами, столбцы и строки которой являются ортогональными единичными векторами (то есть ортонормальными). Можно также определить ортогональную матрицу как матрицу, обратная для которой равна транспонированной[7]:

откуда вытекает
- ,

где E — единичная матрица.
Ортогональная матрица A всегда обратима (A−1 = AT), унитарна (A−1 = A*), и нормальна (A*A = AA*). Определитель любой ортогональной матрицы равен либо +1, либо −1[14]. Умножение на ортогональную матрицу задаёт такое линейное преобразование арифметического пространства , которое в случае матрицы с определителем +1 является простым поворотом, а в случае матрицы с определителем −1 является либо простым отражением, либо суперпозицией отражения и поворота.

Комплексным аналогом ортогональной матрицы является унитарная матрица.
Операции
След
Следом квадратной матрицы A (tr(A)) называется сумма элементов главной диагонали. В то время как умножение матриц, вообще говоря, не коммутативно, след произведения двух матриц не зависит от порядка сомножителей:
- tr(AB) = tr(BA).
Это непосредственно вытекает из определения произведения матриц:

Также след матрицы равен следу транспонированной к ней, то есть
- tr(A) = tr(AT).
Определитель

Определитель det(A) или |A| квадратной матрицы A — это число, определяющее некоторые свойства матрицы. Матрица обратима тогда и только тогда, когда её определитель ненулевой. Абсолютная величина определителя равна площади (в R2) или объёму (в R3) образа единичного квадрата (или куба), в то время как знак определителя соответствует ориентации соответствующего отображения — определитель положителен в том и только в том случае, когда ориентация сохраняется.
Определитель 2×2 матриц вычисляется по формуле

Определитель матриц 3×3 использует 6 произведений (правило Сарруса). Более длинная формула Лейбница обобщает эти две формулы на все размерности[15].
Определитель произведения матриц равен произведению определителей сомножителей:
- det(AB) = det(A) • det(B)[16].
Добавление любой строки с коэффициентом к другой строке, или любого столбца с коэффициентом к другому столбцу не изменяет определителя. Обмен местами двух строк или столбцов приводит к изменению знака определителя[17]. Используя эти операции, любую матрицу можно привести к нижней (или верхней) треугольной матрице, а для таких матриц определитель равен произведению элементов главной диагонали, что даёт способ вычисления определителя любой матрицы. Наконец, теорема Лапласа выражает определитель в терминах миноров, то есть определителей меньших матриц[18]. Эта теорема даёт возможность рекурсивного вычисления определителей (начав с определителя матрицы 1×1, или даже с определителя матрицы 0×0, который равен 1), что можно рассматривать как эквивалент формуле Лейбница. Определители можно использовать для решения линейных систем с помощью метода Крамера[19].
Собственные значения и собственные вектора
Число λ и ненулевой вектор v, удовлетворяющие уравнению
- Av = λv,
называются собственным значением и собственным вектором матрицы A соответственно[20]. Число λ является собственным числом n×n матрицы A в том и только в том случае, когда A−λE не имеет обратной, что эквивалентно

Многочлен pA от неизвестного X, получаемый как определитель det(XE−A), называется характеристическим многочленом матрицы A. Это нормированный многочлен степени n. Таким образом, уравнение pA(λ) = 0 имеет максимум n различных решений, то есть собственных значений матрицы[21]. Эти значения могут быть комплексными, даже если все элементы матрицы A вещественны. Согласно теореме Гамильтона — Кэли, pA(A) = 0, то есть при подстановке самой матрицы в характеристический многочлен, получим нулевую матрицу[22].
Примечания
- Воеводин и Кузнецов, 1984, с. 26.
- Воеводин и Кузнецов, 1984, с. 26—27.
- Икрамов, 1991, с. 9—10.
- Победря, 1986, с. 41.
- Воеводин и Кузнецов, 1984, с. 74.
- Воеводин и Кузнецов, 1984, с. 73.
- Икрамов, 1991, с. 10.
- Хорн и Джонсон, 1989, Теорема 2.5.6, с. 129—130.
- Brown, 1991, Definition I.2.28, p. 21.
- Brown, 1991, Theorem I.5.13, p. 61.
- Хорн и Джонсон, 1989, 7.1. Определения и свойства, с. 471—474.
- Хорн и Джонсон, 1989, Теорема 7.2.1, с. 477—478.
- Хорн и Джонсон, 1989, Пример 4.0.6, с. 202.
- Воеводин и Кузнецов, 1984, с. 71—72.
- Brown, 1991, Definition III.2.1, p. 167.
- Brown, 1991, Theorem III.2.12, p. 173.
- Brown, 1991, Corollary III.2.16, p. 174.
- Mirsky, 1990, Theorem 1.4.1, p. 14—15.
- Brown, 1991, Theorem III.3.18, p. 189.
- Беллман, 1976, с. 56.
- Brown, 1991, Corollary III.4.10, p. 198.
- Гантмахер, 1988, с. 87.
Ссылки
- Беллман Р. . Введение в теорию матриц. 2-е изд. — М.: Наука, 1976. — 352 с.
- Воеводин В. В., Кузнецов Ю. А. . Матрицы и вычисления. — М.: Наука, 1984. — 320 с.
- Гантмахер Ф. Р. . Теория матриц. 4-е изд. — М.: Наука, 1988. — 552 с. — ISBN 5-02-013722-7.
- Икрамов Х. Д. . Несимметричная проблема собственных значений. Численные методы. — М.: Наука, 1991. — 240 с. — ISBN 5-02-014462-2.
- Победря Б. Е. . Лекции по тензорному анализу. 3-е изд. — М.: Изд-во Моск. ун-та, 1986. — 264 с.
- Хорн Р., Джонсон Ч. . Матричный анализ. — М.: Мир, 1989. — 655 с. — ISBN 5-03-001042-4.
- Brown, William C. . Matrices and Vector Spaces. — New York: Marcel Dekker, 1991. — viii + 328 p. — ISBN 978-0-8247-8419-5.
- Mirsky, Leonid. . An Introduction to Linear Algebra. — New York: Dover Publications, 1990. — viii + 440 p. — ISBN 978-978-0-486-66434-7.