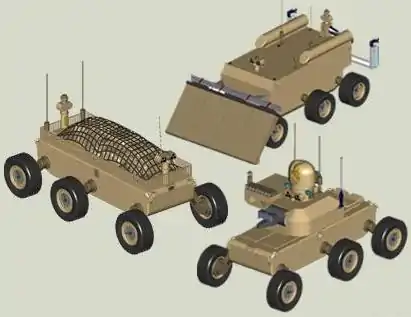
Crusher (боевая машина)
Crusher (/ˈkrʌʃə/, произносится «Кра́шэр», в пер. с англ. «дробилка» или «раздавливатель») — американская полноприводная роботизированная боевая разведывательная машина повышенной проходимости на базе более раннего опытного прототипа — роботизированной платформы Spinner, разрабатывавшаяся с 2004 г. Национальным инженерным центром робототехники при Университете Карнеги — Меллон по заказу Агентства по перспективным оборонным научно-исследовательским разработкам США на сумму 35 млн амер. долл. в рамках межведомственной программы разработки роботов повышенной проходимости UGCV-Perception for Off-Road Robots Integration (UPI), осуществлявшейся совместно с Армией США. Первое публичное представление (выкатывание) машины американской общественности состоялось 28 апреля 2006 г.[1] После передачи проектных материалов компании BAE Systems, — одному из крупнейших подрядчиков военно-промышленного комплекса США, — шасси БРМ «Крашэр» послужило основой для колёсных вариантов семейства боевых машин ARV, разрабатывавшихся филиалами BAE Systems в интересах Армии США, которые, однако, были отвергнуты армейским командованием. 29 ноября 2007 г. Инженерным центром исследований и разработки автобронетанковой техники Армии США был заключён контракт с учреждением-разработчиком на проведение НИОКР на общую сумму 14,4 млн амер. долл., с целью интеграции БРМ «Крашэр» в состав комплекса боевых и вспомогательных роботизированных средств, разрабатывавшихся в рамках государственной программы перевооружения Армии США Future Combat Systems. В соответствии с требованиями заказчика, БРМ «Крашэр» предназначалась для обеспечения огневой поддержки мотопехотных подразделений и ведения тактической разведки в интересах общевойсковых батальонов бригадных тактических групп нового типа (БТГр) Сухопутных войск США[2].
| Crusher | |||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| | |||||||||||||||||||||||||||||||||||||||||
| Crusher | |||||||||||||||||||||||||||||||||||||||||
| Классификация | боевая разведывательная машина повышенной проходимости | ||||||||||||||||||||||||||||||||||||||||
| Боевая масса, т |
5,987 (незаправленная, без брони); 6,350 (заправленная); 6,500 (нормальная боевая масса); 9,980 (максимальная) |
||||||||||||||||||||||||||||||||||||||||
| Компоновочная схема | лафетная безбашенная | ||||||||||||||||||||||||||||||||||||||||
| Экипаж, чел. | 0 | ||||||||||||||||||||||||||||||||||||||||
| История | |||||||||||||||||||||||||||||||||||||||||
| Разработчик |
|
||||||||||||||||||||||||||||||||||||||||
| Производитель |
|
||||||||||||||||||||||||||||||||||||||||
| Годы разработки | 2004—200? | ||||||||||||||||||||||||||||||||||||||||
| Количество выпущенных, шт. | не менее 4 (опытные образцы) | ||||||||||||||||||||||||||||||||||||||||
| Основные операторы |
|
||||||||||||||||||||||||||||||||||||||||
| Размеры | |||||||||||||||||||||||||||||||||||||||||
| Длина корпуса, мм | 5105,4 | ||||||||||||||||||||||||||||||||||||||||
| Ширина, мм | 2590,8 | ||||||||||||||||||||||||||||||||||||||||
| Высота, мм | 2590,8 | ||||||||||||||||||||||||||||||||||||||||
| Клиренс, мм | 0—762 (регулируемый) | ||||||||||||||||||||||||||||||||||||||||
| Вооружение | |||||||||||||||||||||||||||||||||||||||||
| Дальность стрельбы, км |
1,83 (эффективная очередями); 1,5 (эффективная одиночными); 6,8 (максимальная) |
||||||||||||||||||||||||||||||||||||||||
| Пулемёты | 1 × 12,7-мм M2HB (на съёмной турели) | ||||||||||||||||||||||||||||||||||||||||
| Двигатель | |||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||
| Подвижность | |||||||||||||||||||||||||||||||||||||||||
| Тип двигателя |
гибридный: 1 × турбодизельный (ТД), 6 × тяговых электрических (ТЭД), 1 × резервный электрический (РЭД) |
||||||||||||||||||||||||||||||||||||||||
| Мощность двигателя, л. с. |
282 (210 кВт); мощность генератора — 78 (58 кВт) |
||||||||||||||||||||||||||||||||||||||||
| Удельная мощность, л. с./т | 47 | ||||||||||||||||||||||||||||||||||||||||
| Колёсная формула | 6 × 6 | ||||||||||||||||||||||||||||||||||||||||
| Тип подвески | гидропневматическая независимая активная с регулируемым клиренсом и настраиваемой жёсткостью амортизаторов | ||||||||||||||||||||||||||||||||||||||||
| Преодолеваемый подъём, град. | >40° | ||||||||||||||||||||||||||||||||||||||||
| Преодолеваемая стенка, м | >1,22 | ||||||||||||||||||||||||||||||||||||||||
| Преодолеваемый ров, м | >2,03 | ||||||||||||||||||||||||||||||||||||||||
Презентация
Свой первый публичный дебют машина произвела в кампусе Университета Карнеги — Меллон в ходе шоу, стилизованного под национальные соревнования джипов-монстров Monster Truck Challenge, где две БРМ «Крашэр», проехав под громкую музыку и световые эффекты по территории студгородка, въехали внутрь здания главного корпуса университета, после чего одна из них заняла место на подиуме как экспонат, а другая в это время разъезжала вокруг и для пущего соответствия своему названию давила своими колёсами ряды специально привезённых для этой цели легковых автомобилей[3].
Назначение
Исходно, машина разрабатывалась как многоцелевая единица роботизированной бронетехники, предназначенная для действий в автономном режиме (вне военных подразделений) и самостоятельного решения широкого круга боевых задач, в первую очередь, в условиях исключающих или сильно затрудняющих действия конвенциональной бронетехники с человеческими экипажами (химико-биологическое и/или радиационное заражение местности, многочисленные минно-инженерные заграждения, активное противодействие противника и т. п.). Регулируемый клиренс позволял машине залегать дном на грунт и проводить в таком положении необходимое количество времени, ведя при этом непрерывное наблюдение за обстановкой, разведку противника и мониторинг атмосферного воздуха на предмет наличия в нём следов применения химического, биологического или ядерного оружия. Таким образом, машина по всем своим параметрам подходила для выполнения разведывательных задач, требующих длительного неподвижного нахождения средств разведки на переднем крае, либо в тылу противника, что в равной степени позволяло вести патрулирование и выезжать в дозор в любых условиях обстановки, в том числе и в условиях мирного времени, а не только в ходе ведения боевых действий. Однако, недостаточная огневая мощь бортового вооружения не позволяла самостоятельно решать многие огневые задачи, что требовало действий в связке с удалённо расположенными средствами поражения с неуправляемыми боеприпасами (дальнобойной артиллерией, системами залпового огня), средствами-носителями высокоточного оружия (управляемых ракет) и т. п. Таким образом, машина выполняла разведывательно-корректировочные и целеуказательные функции, а в условиях вооружённого конфликта с технически оснащённым противником, тактико-технические характеристики её бортового вооружения были достаточными только для решения оборонительных задач — для борьбы с живой силой и легкобронированной техникой противника вне укрытий, что само по себе сужало потенциальный спектр способов её боевого применения и ставило в разряд боевых разведывательных машин[4]. Размеры и вес БРМ «Крашэр» позволяли перевозить по две машины на борту тяжёлого военно-транспортного самолёта C-130 «Геркулес».[5]
Режимы управления
- Ручной
Дистанционное управление оператором, который находится
- в непосредственной близости от машины, визуально наблюдая маршрут её движения на местности и управляя ею при помощи ручного пульта управления, — применяется вне района ведения боевых действий при проведении пуско-наладочных и регламентных работ, проверке ходовых качеств и маневренности машины, в сочетании с контрольно-проверочным оборудованием или без него;
- на командном пункте, расположенном на безопасном удалении от района оперативного предназначения боевых средств, наблюдая маршрут движения машины по приборам, видеосигналу, отображающемуся в виде цветного изображения на экране, а также по индикаторам кругового обзора и разного рода датчикам и управляя ею при помощи настольного пульта (панели) управления, — применяется при выполнении боевой задачи;
- Автономный
Полностью автономное управление, включается и выключается по команде оператора или в случае нарушения радиокомандной линии.
Техническое описание
Двигательная установка машины представляет собой гибрид, включающий в себя один турбодизельный двигатель (аналогичный используемым в гражданских автомобилях Volkswagen Jetta, но модифицированный)[6] и шесть приводных электродвигателей, по одному на каждое колесо, а также резервный электродвигатель, аккумулирующий электроэнергию, вырабатываемую в результате работы основных двигателей и позволяющий машине идти на выключенных или вышедших из строя двигателях от 3 до 16 километров, в зависимости от перевозимой полезной нагрузки, типа местности и скорости движения. При движении на резервном двигателе машина перемещалась не создавая шума от работы двигателей, что обеспечивало скрытность передвижений в тёмное время суток, а также в светлое время суток, в условиях, препятствующих нормальному обзору (дым, туман, дождь, метель и т. д.). Помимо крутых склонов и сложнопересечённой местности, БРМ «Крашэр» способна свободно преодолевать препятствия, типичные для обстановки уличного боя, в виде легковых машин, невысоких оград, зелёных насаждений и тому подобных объектов городского ландшафта. Характерной отличительной особенностью БРМ «Крашэр» являются четыре лазерных дальномера, внешне напоминающие передние фары автотранспортного средства, смонтированные в передней части корпуса на шарнирах и непрерывно раскачивающиеся в вертикальной плоскости вверх-вниз во время движения машины, а также один лазерный дальномер смонтированный на крыше корпуса машины и вращающийся по часовой стрелке на 360° в горизонтальной плоскости, внешне и по своему принципу работы напоминающий проблесковый маячок. Кроме дальномеров, её экстерьер отличается четырьмя стереоскопическими видеокамерами в лобовой части корпуса — своего рода «глазами» машины. В автономном режиме машина управляется при помощи комбинированного бортового навигационного оборудования, которое включает в себя GPS-навигатор для спутниковой навигации, а также лазерные дальномеры, видеокамеры и другую контрольно-измерительную аппаратуру для ориентирования на местности, при помощи которой, бортовое оборудование навигации машины само формирует трёхмерную план-схему местности, по которой машина ориентируется в ходе движения[5]. В ручном режиме машина может управляться при помощи программного обеспечения, установленного в качестве системной утилиты на компьютер, либо в качестве мобильного приложения на карманное устройство мобильной связи, выпускаемое серийно коммерческими производителями, к примеру, на мобильный телефон или айфон. Стационарный или мобильный командный пункт оснащён внутри необходимым оборудованием управления БРМ «Крашэр», которое внешне напоминает собой обыкновенное место водителя в салоне автотранспортного средства, с соответствующим интерьером (руль, педали, рычаги, тумблеры, кнопки и другие элементы панели управления), — главное отличие между ними заключается в том, что вместо лобового стекла на пульте управления расположен дисплей. Для разнообразия, разработчики предусмотрели возможность дистанционного управления машиной при помощи ручного манипулятора (джойстика) от игровой приставки Xbox 360, — в таком виде, условия работы оператора практически идентичны домашним условиям, в которых любители видеоигр играют в так называемые «шутеры» (виртуальные игры-стрелялки), пользовательский интерфейс программы управления напоминает танковый симулятор, с той разницей, что на экране панели управления БРМ «Крашэр» отображается реальная действительность, а не виртуальная реальность[7].
Бортовое оборудование
- Базовое электронно-навигационное
- Центральное процессорное устройство Pentium 3 с частотой 700 МГц;
- Инерциальный измерительный блок IMU;
- Базовое оптико-электронное
- Дальномерное оборудование LADAR
- 4 лазерных дальномера, размещённых в передней части машины и вращающихся в вертикальной плоскости (сканирующие местность в непосредственной близости перед машиной на удалении до нескольких метров), для определения местонахождения машины в пространстве, ориентирования на местности, определения азимута, измерения расстояний, прокладки маршрута;
- 1 лазерный дальномер, размещённый поверх корпуса машины и вращающийся в горизонтальной плоскости (сканирующий пространство вокруг машины в радиусе 67 метров).
- Видеоаппаратура
- 6 видеокамер наблюдения, расположенных в различных частях корпуса;
- 16 видеокамер оценки обстановки, расположенных в передней части корпуса и по бортам;
- 4 стереоскопических видеокамеры, расположенных в передней части корпуса с дальностью обзора, позволяющей зафиксировать и распознать человеческую фигуру на фоне окружающей местности на расстоянии до 4 километров.
- Модульная разведывательная и контрольно-измерительная аппаратура
- Выдвижная перископическая мачта длиной 6 метров, для размещения разведывательной и контрольно-измерительной аппаратуры.
- Модульное вооружение
- Дистанционно управляемая турель Rafael Mini Typhoon, позволяющая установку различного стрелково-пушечного вооружения: пулемётов (калибром до 12,7 мм) или автоматических гранатомётов (калибра 40 мм), а также некоторых ракетных систем.
Технические недостатки
Технической недоработкой автономного управления машиной было то, что её бортовые средства распознавания не отличали людей от других элементов местности, то есть в том случае, если бы люди находились на пути движения машины, она бы их попросту переехала, независимо от того, были ли они комбатантами своими или чужими, или же просто гражданскими лицами — пешеходами. Соответственно этому, даже если удавалось решить проблему идентификации «свой—чужой», проблема рассмотрения искусственным интеллектом машины человека как преграды её движению, которую не требуется объезжать, разработчиками решена не была, что делало невозможным применение БРМ «Крашэр» самостоятельно в населённых пунктах и при сопровождении войск на любом типе местности[4].
Сравнительная характеристика
Просмотр этого шаблона и Early Infantry Brigade Combat Team (E-IBCT) | ||||||||
|---|---|---|---|---|---|---|---|---|
| Наименование машины | MULE-T | MULE-C | ARV-A-L | ARV-A | ARV-H | ARV-R | Crusher | |
| Индекс заказчика | XM1217 | XM1218 | XM1219 | индекс не присваивался | ||||
| Изображение |  |  |  |  | ||||
| Назначение | транспортная | инженерная | боевая разведывательная | боевая | боевая разведывательная | многоцелевая | ||
| База | колёсная | колёсная | колёсная | колёсная | гусеничная | колёсная | колёсная | |
| гусеничная | ||||||||
| Головная организация (генподрядчик работ) | Lockheed Martin Missiles and Fire Control Systems, Inc. | BAE Systems, Inc. | CMU | |||||
| Государственный контракт | дата заключения | 18 августа 2003 | 15 августа 2005 | |||||
| дата расторжения | 2009 | 2010 | 8 февраля 2007 | 8 февраля 2007 | ||||
| Задействованные структуры (субподрядчики) | разработчик | Teledyne Brown Engineering, Inc. | United Defense Industries, Inc. | NREC | ||||
| система автономной навигации | General Dynamics Robotics Systems, Inc. | |||||||
| бортовая аппаратура и программное обеспечение | Austin Info Systems, Inc., Raytheon Co., Textron Systems Corp. | |||||||
| Omnitech Robotics International LLC | ||||||||
| системный интегратор | Boeing Co., Science Applications International Corp. | |||||||
| Программа опытно-конструкторских работ | Multifunction Utility/Logistics and Equipment | Armed Robotic Vehicle | ||||||
| Общая стоимость программы НИОКР, млн долл. | 261,7 | 318,3 | 35 | |||||
| Госзаказ на серийное производство, ед. | 567 | 477 | 702 | 675 | н/д | |||
| Парк бригады нового состава по штату, ед. | 90 | 18 | 18 | н/д | 27 | н/д | ||
| Боевая масса, кг | 3323 | 3175 | 9300 | 13000 | 8437 | 6350 | ||
| Габариты | длина, мм | 4340 | 4353,56 | 4353,56 | 4470,4 | 6019,8 | 4470,4 | 5105,4 |
| ширина, мм | 2242,82 | 2413 | 2242,82 | 2514,6 | 2590,8 | |||
| высота, мм | 1968,5 | 2524,76 | 2567,94 | 2451,1 | 1524 | |||
| Ходовые качества | скорость по шоссе, км/ч | 65 | ||||||
| скорость по пересечённой местности, км/ч | 48 | 42 | ||||||
| запас хода по шоссе, км | 200 | 400 | ||||||
| запас хода по пересечённой местности, км | 100 | |||||||
| Вооружение на борту | стрелково-пушечное | не предусматривалось | 25-мм автоматический гранатомёт XM307 или | 30/40-мм автоматическая пушка Mk 44 или другая аналогичного типа и | 25-мм автоматический гранатомёт XM307 или | 12,7-мм крупно-калиберный тяжёлый пулемёт M2HB | ||
| 7,62-мм единый пулемёт M240 | ||||||||
| управляемое ракетное | 4 × ПТУР FGM-148 Javelin P3I (разрабатывалась) или | 4 × ПТУР AGM-114 Hellfire или | не предусматривалось | |||||
| 4 × ПТУР CKEM (разрабатывалась) | 4 × ПТУР AGM-169 Joint Common Missile (разрабатывалась) | |||||||
| Система управления | автономная навигационная система ANS + радиокомандное управление AN/PSW-2 | |||||||
Источники информации
| ||||||||
Модификации
На базе БРМ «Крашэр» были созданы следующие модификации:
Mini Crusher
Вариант транспортно-грузовой машины с уменьшенными массо-габаритными характеристиками, разработанный Национальным инженерным центром робототехники, способный перемещаться среди завалов и других последствий разрушений, вызванных стихийными или техногенными факторами случайного (катастрофа) или целенаправленного (применение средств поражения) происхождения, а также для выполнения широкого круга задач, обусловленных его высокими маневренными качествами.
Autonomous Platform Demonstrator
Вариант боевой машины, разработанный сотрудниками Инженерного центра исследований и разработки автобронетанковой техники Армии США по материалам, полученным от Национального инженерного центра робототехники.
См. также
- Dragon Runner
- Gladiator
- RoboScout
- Spinner
- Назир
Примечания
- Crusher Unmanned Ground Combat Vehicle Unveiled (англ.) Архивировано 13 сентября 2016 года.. — Arlington, VA: Defense Advanced Research Projects Agency, April 28, 2006. — P.1 — 2 p.
- Watzman, Anne ; Spice, Byron. Carnegie Mellon’s National Robotics Engineering Center Receives $14.4 Million To Develop and Demonstrate Next-Generation Autonomous Ground Vehicle (англ.). // Carnegie Mellon University Official Web-site. — Pittsburgh, PA: Carnegie Mellon University, 29 November 2007.
- Layton, Julia. How Crusher Works (1) (англ.). // HowStuffWorks. — InfoSpace Holdings LLC.
- White, Andrew. Unmanned Ground Vehicles: Step Change in Urban Operations as UGVs Face up to Enemy (англ.). // Jane’s International Defense Review. — Coulsdon, Surrey: Jane’s Information Group, June 2007. — Vol.40 — No.6 — P.40–46 — ISSN 1476-2129.
- Layton, Julia. How Crusher Works (2) (англ.). // HowStuffWorks. — InfoSpace Holdings LLC.
- Shane, Leo. They call him the Crusher (англ.). // Stars and Stripes : Daily Newspaper. — Washington D.C.: Defense Media Activity, February 25, 2008. (недоступная ссылка — история)
- Pentagon’s ‘Crusher’ Robot Vehicle Nearly Ready to Go (англ.). // FoxNews. — FOX News Network, LLC, February 27, 2008.
 |
|  | |||||||||||||||
| |||||||||||||||||
| |||||||||||||||||
| |||||||||||||||||
| |||||||||||||||||
| |||||||||||||||||
* — производились только на экспорт; ** — проекты танков с ядерной силовой установкой; курсивом выделены опытные и не пошедшие в серийное производство образцы | |||||||||||||||||
.jpg.webp)




| Сухопутная техника |
| |||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Авиационная техника |
| |||||||||||||||||||||||||||||||||||||||||
| Средства защиты |
| |||||||||||||||||||||||||||||||||||||||||
| Оборудование |
| |||||||||||||||||||||||||||||||||||||||||
| Снаряжение |
| |||||||||||||||||||||||||||||||||||||||||
| Боеприпасы |
| |||||||||||||||||||||||||||||||||||||||||
| Военные учения и эксперименты |
| |||||||||||||||||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||||||||||||||||