Теория пластин
Тео́рия пласти́н — раздел теории упругости, в котором рассматриваются упругие тела с толщиной много меньше, чем остальные геометрические размеры. Сведение трёхмерной задачи теории упругости к двумерной и её решение являются основными темами теории пластин. Общий вопрос теории заключается в нахождении уравнений, отвечающих за связи между деформациями и напряжениями при различных допущениях. В случае тонких пластин и малых прогибов применяют теорию Кирхгофа — Лява. Большие прогибы тонких пластин описываются уравнениями Фёппля — фон Кармана. Для упругих свойств толстых пластин применяют теорию Миндлина. Исторически теория пластин развивалась в связи с многочисленными практическими применениями в строительстве, а позже — в кораблестроении и самолётостроении, где важны расчёты на прочность.
В общем случае теория пластин строится на выводе уравнений для совместности деформаций, уравнений равновесия, указания материальных соотношений теории упругости и заданием граничных условий. Современная трактовка уравнений теории пластин основывается на вариационных принципах. Если задача имеет высокую симметрию, то уравнения теории пластин принимают упрощённый вид. В целом теория пластин в её оригинальной аналитической формулировке теряет актуальность, и, в настоящее время, используют численные методы для расчёта пластин, среди которых наибольшей распространённостью пользуются методы конечных элементов.
Определения и классификация пластин
Тело, имеющее форму прямой призмы или прямого цилиндра с высотой (толщиной) много меньше, чем другие размеры, называется пластиной (пластинкой) с постоянной толщиной. В таком теле можно выделить срединную плоскость, которая делит пополам толщину пластинки, а её пересечение с боковыми поверхностями формирует контур пластины. В задачах теории пластин рассматривают пластины, закреплённые по контуру, и силы (усилия) натуральным образом делятся на две компоненты: действующие в срединной плоскости и действующие перпендикулярно ей[1]. При решении задачи обычно интересует форма срединной плоскости после приложения внешних сил и граничных условий. При этом точки срединной плоскости при изгибах (прогибах) переходят в новые положения и формируют срединную поверхность. Прогибы пластины считаются сравнимыми с толщиной пластины, что соответствует большим прогибам, но малы по сравнению с другими размерами пластины, и срединная поверхность полога. При определённом характере напряжений в пластине можно говорить о трёх категориях пластин: жёстких, гибких и абсолютно гибких пластинах или мембранах[1]. При отсутствии или пренебрежении напряжений растяжения-сжатия срединной плоскости говорят о жёстких пластинах. При учёте напряжений (помимо изгибных), распределённых по толщине (так называемые мембранные напряжения), возникает неразвёртывающаяся поверхность, то есть часть пластины увеличивает или уменьшает длины составных слоёв срединного слоя пластины. Если можно пренебречь собственными изгибными напряжениями по сравнению с напряжениями в срединной плоскости, то говорят об абсолютно гибких пластинах или мембранах[2]. Условно можно говорить о жёстких пластинах при величине прогиба меньше, чем 1/5 от толщины, а о мембранной пластине, если прогиб в 5 раз больше толщины пластины[3].
История
Исследованию тонких пластин положила начало работа Эйлера, опубликованная в трудах Петербургской Академии наук в 1766 году, который рассмотрел колебания абсолютно гибких пластин (или мембран) прямоугольной и круглой форм[4]. Он решал волновое уравнение для малых колебаний. Впервые колебания жёстких пластин рассмотрел ученик Эйлера Я. Бернулли в 1788 году. Он рассмотрел линейное дифференциальное уравнение 4-ой степени для малых прогибов, но не учёл смешанные производные, которые отвечают за кручение пластины, поскольку рассматривал прямоугольную пластину как сетку упругих балок[5]. В 1809 году Хладни продемонстрировал свои эксперименты с песком, насыпанном на вибрирующие пластинки во Французской академии наук, которая установила премию благодаря присутствующему на заседании Наполеону за разработку математической теории[6]. Первой использовать вариационный подход в теории пластин в 1811 году стала С. Жермен, которая рассмотрела эту задачу и оказалась единственным кандидатом на получение премии, но получила неправильный результат из-за некорректного выражения для потенциальной энергии и осталась без премии[7]. Результат был исправлен Лагранжем в 1813 году, который присутствовал на докладе С. Жермен. Уравнение для малых прогибов тонкой пластины носит название уравнение Лагранжа — Жермен. Существенный вклад в теорию жёстких пластин внесли работы Навье и Кирхгофа, которые решали уравнения для малых прогибов для некоторых граничных условиях[8]. В 1812 году Пуассон применил теоретические воззрения об атомарных силах Бошковича для рассмотрения упругости мембран[9]. Уравнения равновесия для упругого тела получил в 1821 году Навье исходя из молекулярного строения твёрдых тел[10]. Навье также построил первую приемлемую теорию изгиба пластинок под действием равномерно распределённой нагрузки и рассмотрел задачу о выпучивании пластины под действием сжимающих сил[11].
Понятие о функции напряжения ввёл Эйри, когда рассматривал двумерный аналог теории балок в 1862 году[12]. Треска представил в 1868 году доклады во Французскую академию наук о течении металлов под большим давлением. Сен-Венан, заинтересовавшись этими докладами, ввёл понятие динамической пластичности металлов и рассмотрел несколько задач о кручении брусьев[13].
Теория гибких пластинок оказалась востребована в кораблестроении на рубеже XIX и XX веков в связи с переходом к металлическим корпусам судов. Увеличение тоннажа судов приводило к прогибам обшивки бо́льшим, чем её толщина[14]. И. Г. Бубнов поставил такую задачу в приложении к кораблестроению и решил её. В 1902 году он опубликовал работу «Напряжения в обшивке судов от давления воды». В этой работе он указал на наблюдаемое, во многих случаях, превышение напряжений над допустимыми при статической нагрузке. И. Г. Бубнов предложил использовать разделение пластин по характеру напряжённого состояния в них на жёсткие, гибкие и мембраны. в 1906—1907 годах ввёл в обиход применение метода последовательных приближений и использовал его для расчёта корпуса линейных кораблей класса «Севастополь».
Кирхгоф поставил задачу о нахождении уравнений для большого прогиба пластин и показал, что деформация срединной плоскости в таком случае зависит от прогиба нелинейно. В конечном виде уравнение равновесия он не получил, хотя предварительные выкладки сделал. Сен-Венан в 1881 году в комментариях для книги Клебша «Теория упругости» вывел уравнение для больших прогибов пластинки, но считал усилия заданными[8]. В 1907 году Фёппль рассмотрел систему уравнений для больших прогибов абсолютно гибких пластин и ввёл функцию напряжений. В 1910 году фон Карман дополнил уравнения Фёппля членом с цилиндрической жёсткостью, представив современную систему уравнений для больших прогибов пластин, названную уравнениями Фёппля — фон Кармана[15]. С. П. Тимошенко рассмотрел круглую пластину с приложенным по контуру моментом нагрузки. Для решения он применил метод Ритца.
В 1930-х годах в Советском Союзе и в мире исследования тонких пластин получили большой толчок из-за бурного развития самолётостроения. В частности, важным вопросом была устойчивость пластин при усилиях сжатия и сдвига в срединной плоскости. Задача определения несущей способности обшивки оказалась наиболее востребована в самолётостроении[16]. В 1929—1932 годах Г. Вагнер и фон Карман рассмотрели закритические деформации пластинок при сдвиге и сжатии. Аналогичные исследования опубликовал П. А. Соколов в 1932 году. Энергетический метод для теории устойчивости пластин применили Маргерр, Кромм и Треффц в 1937 году. Также П. Я. Полубаринова-Кочина использовала впервые метод возмущений, когда неизвестные функции раскладываются в ряд по малому параметру, для решения тех же задач.
В 1936 году Г. Г. Ростовцев получил уравнения для анизотропной пластинки. В последующем он рассмотрел закритические деформации изотропных и ортотропных пластин[16].
С. Уэй рассмотрел задачу о больших прогибах круглой защемлённой по контуру пластины с равномерной внешней нагрузкой[17]. Он получил точное решение для уравнений фон Кармана в виде бесконечных рядов. Для более быстрой сходимости Р. С. Алвар и др. использовал разложение искомых функций в ряд полиномов Чебышёва[18]. В последующей статье результат был обобщён на случай больших перемещений ортотропной пластины, где рассматривались также численные решения для колебаний круглой пластины с различными граничными условиями[19]. В. В. Соколовский рассмотрел вопрос о пластических деформациях свободно опертых круглой и кольцевой пластинок с использованием поверхности пластичности Мизеса[20][21]. Охаши Ю. и др. рассмотрели упруго-пластические деформации защемлённой круглой пластины при равномерной кольцевой нагрузке, используя метод Соколовского[22].
Уравнение совместности деформаций
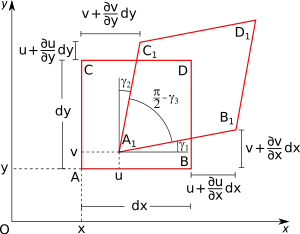
Уравнения совместности деформаций возникают при рассмотрении сплошного тела. Деформации в таком случае не могут быть независимыми. Пусть h — толщина пластины, x и y — декартовы координаты заданные в срединной плоскости, z — направление, определяющее прогибы пластины. Перемещения вдоль осей x, y и z задаются функциями двух координат срединной плоскости u(x,y), v(x,y) и w(x,y), соответственно. Деформации удлинения срединной плоскости в направлении x и y обозначаются посредством и , а также деформация сдвига в плоскости xy обозначается . Каждая из деформаций зависит от функций перемещений[23]. Пусть точка A (см. рис. 1) с координатами (x,y) переместится на (u,v), точка B с координатами (x+dx,y) перемещается в точку , точка C с координатами (x,y+dy) перемещается в точку [24]. Теперь зная новые длины сторон dx1,dy1 из геометрических соображений можно определить относительное удлинение в направлении x до второго порядка малости и первого порядка, который нас интересует[25]:






Перемещения в срединной плоскости для тонких пластин считаются малыми и обычно отбрасывают второй порядок малости, так как основной вклад вносит перемещение перпендикулярное срединной плоскости. Аналогично получают выражение для деформации по y.

Для деформации сдвига рассматривают разность между прямым углом образованным элементами dx и dy и новым углом после деформации. До первого порядка малости

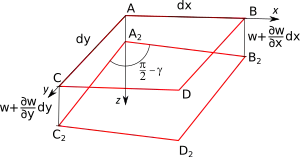
При деформации обусловленной прогибом w удлинение элемента длины находится из геометрических соображений (см. рис. 2).

и соответствующая деформация по x и y[26]


Для деформации сдвига можно получить выражение

Собирая все вклады для деформации срединной плоскости и прогиба, выражения для деформаций запишутся в виде[27]
-
(Ур. 1.1)

-
(Ур. 1.2)

-
(Ур. 1.3)

Дифференцируя дважды по y дважды по x один раз по x и один раз по y, получим выражение для неразрывности деформаций[28]
-
(Ур. 1.4)

Уравнение совместимости деформаций пластины c дополнительным прогибом
При наличии дополнительного прогиба пластины w0 уравнения для связи деформаций с перемещениями также можно записать в замкнутой форме. Эти уравнения всё ещё полезны и имеют простой вид по сравнению с более общей теорией оболочек, где приходится использовать криволинейные координаты[29]:



Уравнение совместимости деформаций при начальном прогибе пластины принимает вид[30]

Напряжения в пластине
Из-за двумерного характера системы напряжение в пластине толщиной h можно разделить на два вклада. Первый вклад относится к равномерному изменению напряжения по толщине пластины, а второй — к изгибным напряжениям. Напряжения срединной плоскости представлены на рисунке 3a. Двум граням параллельным координатным осям x и y соответствуют нормальные напряжения и . Также определяются положительные касательные напряжения обозначенные на рисунке 1a [30]. Изгибные напряжения показаны на рисунке 1b. Нормальные изгибные напряжения при нормали к грани (показана красным) параллельной оси x в точке z обозначаются . Касательные напряжения в той же точке разбиваются на две компоненты и . На другой грани (зелёной) соответствующие нормальные и касательные напряжения равны , и . на обеих гранях равны по теореме о взаимности касательных напряжений[31].








Для пластин вводят изгибающий момент (на единицу длины) по правилам для сечения (изображено на рисунке 1с), нормального к оси x[32]:
-
(Ур. 2.1)

и аналогично для сечения, нормального к оси y:
-
(Ур. 2.2)

Моменты, которые изгибают пластинку так, чтобы срединная поверхность имеет положительную кривизну считаются положительными. Крутящие моменты на единицу длины, то есть отвечающие за кручение пластины показаны на рисунке 1d, вводят для пар касательных напряжений по правилу
-
(Ур. 2.3)

Касательные напряжения и входят в интегралы для поперечных сил[33]
-
(Ур. 2.4)

-
(Ур. 2.5)

Уравнение равновесия
Пластина находится в покое, то есть не двигается или двигается с постоянной скоростью, при действии внешних сил и внутренних напряжений. Зная все силы действующие на элемент пластинки, можно составить уравнения равновесия. Например, приравнивая суммы проекций на ось x всех сил действующих на пластинку можно записать[34]

или после упрощения
-
(Ур. 3.1)

Соответственно для проекции на ось y записывается аналогичное выражение
-
(Ур. 3.2)

Действие моментов на линию в плоскости параллельной оси y записывается в виде[35]

или, приводя подобные при дифференциалах и исключая малые более высоких порядков, можно получить
-
(Ур. 3.3)

Относительно оси x аналогичное выражение принимает вид
-
(Ур. 3.4)

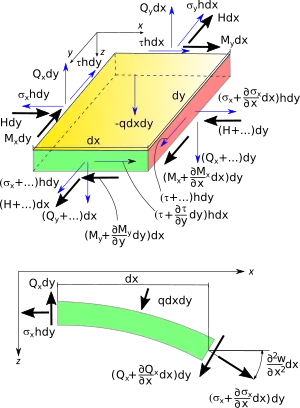
Проекции сил на вертикальное направление с учётом деформации пластинки можно получить из равенства (см. рис. 4)[36]
-
(Ур. 3.5)

Уравнения равновесия пластины c дополнительным прогибом
В случае если пластина имеет изначальный прогиб w- уравнение равновесия для вертикально направления можно записать в виде[36]

Остальные уравнения сохраняют свой вид.
Соотношения между деформациями и напряжениями
Предполагается, что параллельные срединной поверхности слои пластины не оказывают давления друг на друга. Связь между деформациями и напряжениями в пластине задаётся материальными соотношениями, зависящими от упругих свойств материала, как и в случае плоского напряжённого состояния[37]
-
(Ур. 4.1)

-
(Ур. 4.2)

-
(Ур. 4.3)

где E — модуль Юнга, — коэффициент Пуассона, G — модуль сдвига. можно пренебречь. Для изгибных напряжений в любом слое соотношения идентичны. Напряжения изгиба можно записать через перемещения[38]


-
(Ур. 4.4)

-
(Ур. 4.5)

-
(Ур. 4.6)

Для моментов и крутящего момента верны следующие выражения полученные после интегрирования по толщине изгибных напряжений
-
(Ур. 4.7)

-
(Ур. 4.8)

-
(Ур. 4.9)

где — цилиндрическая жёсткость пластины.

Определим оператор Лапласа как

тогда поперечные силы можно записать через цилиндрическую жёсткость в простом виде
-
(Ур. 4.10)

Система основных уравнений для пластины
Для связи между поперечными силами и прогибом удобно ввести функцию напряжений, которая определяется следующим образом[39]
-
(Ур. 5.1)

Введение данной функции мотивировано занулением уравнений равновесия (ур. 3.1) и (ур. 3.2). Уравнение равновесия для вертикального направления с поперечными силами перепишутся в виде[40]
-
(Ур. 5.2)

Это уравнение связывает прогиб тонкой пластины с интенсивностью внешней нагрузки q. Функцию напряжений, используя уравнение совместности деформаций, можно представить в виде
-
(Ур. 5.3)

Эту систему можно записать более компактно через нелинейный дифференциальный оператор L(w,F):
-
(Ур. 5.4)

-
(Ур. 5.5)

где оператор L определён как
-
(Ур. 5.6)

Эта система из двух уравнений задаёт основные уравнения для расчёта прогиба и напряжений тонких пластинок. Их вывел фон Карман. Эти уравнения используются для вывода уравнений для частных случаев. Например, в случае жёсткой пластины под действием только поперечной нагрузки пренебрегают напряжениями в срединной плоскости и F=0. Если жёсткая пластина подвержена поперечной силе и напряжения в срединной плоскости не зависят от прогиба, то уравнения становятся линейными. Для мембран предполагают изгибную жёсткость равную нулю[41].
Система основных уравнений для пластины с начальным изгибом
Геометрический метод также позволяет вывести уравнения фон Кармана для пластин и изначальным прогибом w0 с использованием оператора L[42]:


Граничные условия
В каждой точке контура пластины нужно задать четыре граничных условия для полной постановки задачи о прогибе тонкой пластины[43]. Граничные условия могут принимать форму геометрических условий или быть выражениями сил действующих на контур. Наиболее часто встречающиеся граничные условия приведены в таблице
| Название | Математическая формулировка | Примечания |
|---|---|---|
| Край оперт и без прогиба | ||
| Край защемлён | ||
| Край шарнирно оперт | Используя определение, это условие можно переписать в виде | |
| Край не нагружен и свободно смещается по вертикали | ||
| Край оперт на упругое ребро | EI — жёсткость ребра, Rx определена в предыдущем условии. | |
| Край не нагружен и свободно смещается по оси x | ||
| Край не нагружен и свободно смещается по оси y | Сдвиг по направлению самой грани | |
| Края со связью | Расстояние между краями фиксировано. Это условие можно выразить в виде | |
| Края со связью | Сдвиг между краями конечен. Это условие можно выразить в виде |












Принцип возможных перемещений
Из-за сложности общих уравнений для прогиба тонких пластин для решения уравнений применяются приближённые методы. В частности, вариационный метод оказывается полезен как для вывода уравнений, так и для получения приближённых решений. Согласно началу или принципу возможных перемещений применённому к деформированному телу[45]:
|
Реальное равновесное состояние упругой системы характеризуется тем, что сумма работ всех внешних и внутренних сил на любых кинематически возможных перемещениях точек упругой системы равна нулю. |
Под возможными перемещениями следует понимать бесконечно малые перемещения точек системы, причём соответствующие деформации должны удовлетворять условиям совместности деформаций. Этот принцип запишется кратко в виде:

где — работа внешних сил, а другие слагаемые отвечают за работу внутренних сил. Их можно рассматривать независимо. Первое слагаемое связано с работой усилий в срединной плоскости, а второе слагаемое отвечает за прогиб пластины. Разделение таким образом работ соответствует идее независимости работы усилий в срединной плоскости от изгиба, так же как усилия изгиба не совершают работы при деформации срединной плоскости[46]. Полная работа усилий в срединной плоскости определяется функционалом




где интегрирование производится по всей поверхности пластины. Для работы изгиба учитывается толщина прямоугольной пластины, так как изгибные усилия зависят простым образом от толщины[47]

Работа же внешних сил разложится на несколько слагаемых связанных с действием внешних сил на объём и на каждую из граней, а также учёт работы внешних сил при прогибе. Тогда вариационное уравнение для прогиба пластины основанное на принципе возможных перемещений примет вид[48]:
-
(Ур. 6.1)

Из этого вариационного уравнения можно вывести первое уравнение равновесия для прогибов. Оно учитывает различные статические граничные условия заданные на контурных линиях прямоугольной пластины.
Приближённые методы решения
Вариационные методы
Часто для нахождения аналитического решения конкретной задачи применяют разложение прогиба в ряд[49]
-
(Ур. 7.1)

где функции двух переменных ηi(x,y) удовлетворяют всем необходимым граничным условиям. Для поиска функции напряжения подставляют этот ряд в (ур. 5.3) и интегрируют с учётом граничных условий. Если подставить этот ряд в вариационное уравнение (ур. 6.1), то все контурные интегралы обратятся в ноль из-за выбора вида функций в ряде. Останется только поверхностный интеграл
-
(Ур. 7.2)

где
-
(Ур. 7.3)

Подставляя разложение прогиба с вариативными коэффициентами в этот интеграл, можно получить сумму в виде
-
(Ур. 7.4)

что приводит к системе нелинейных уравнений относительно коэффициентов fi согласно правилу о занулении коэффициентов при вариациях, то есть интегралов типа
-
(Ур. 7.5)

Эти интегралы образуют систему n алгебраических уравнений третьей степени. Такие уравнения называются уравнениями Бубнова — Галёркина. Находя эти коэффициенты, можно вычислить прогиб и функцию напряжений. Степень приближения этого метода к точному решению зависит от выбора начальных функций. На основе вариационных принципов построен также метод Ритца[50]. В некоторых подходах из-за сложности удовлетворения граничным условиях используют разложения двух неизвестных функций: функции напряжений и прогиба; или всех трёх перемещений.
Метод конечных элементов
Метод конечных элементов относится к вариационным численным методам, где функционалом является полная потенциальная энергия системы. В настоящее время (после 1980-х годов) для расчёта тонкостенных конструкций и пластин применяют метод конечных элементов. Несмотря на достигнутый прогресс тонкие пластины всё ещё остаются сложной темой для численных расчётов. Хотя сведение полной трёхмерной задачи упругости к двумерной не представляет сложности, а уменьшение размерности должно приводить к существенному выигрышу в производительности, но с понижением размерности увеличивается порядок вариационных уравнений[51][52]. Для теории Кирхгофа — Лява (малые прогибы тонких пластин) в функционал потенциальной энергии входят вторые производные функции прогиба, что накладывает дополнительные условия однократной гладкости на вариационные функции. Для таких конформных элементов не возникает проблема сходимости решения[53]. Второй подход заключается в использовании негладких функций, за счёт усложнения основных уравнений упругости, включающие сдвиги. Для линейного распределения перемещений по толщине такая теория называется теорией Тимошенко — Миндлина. Эта теория испытывает сложности для объяснения случая очень тонких пластин из-за возникновения эффекта запирания или заклинивания англ. the locking effect[54]. Для решения этой проблемы используется множество методов[55].
Другие методы
В методе возмущений решается основная система уравнений и искомые функции разлагаются в бесконечные степенные ряды по какому-либо малому параметру. В качестве него удобно выбрать прогиб в какой-то точке. Подставляя эти ряды в основную систему нужно приравнять получившиеся выражения при одинаковых степенях малого параметра. Теперь нужно решить полученные уравнения при соответствующих граничных условиях[56]. В первом порядке уравнения сводятся к линейным уравнениям для жёсткой пластинки. Находя последовательно решения можно получить разложение.
Подобная же идея лежит в основе метода последовательного приближения, где сначала решается линейная система (невозмущённая), а потом решения подставляются в правую часть полных уравнений как известные функции. Приближение строится последовательным повторением этих шагов[57].
В настоящее время в основном применяются численные методы основывающиеся на конечных разностях[58] или метод конечных элементов[59] .
В теории пластичности А. А. Ильюшиным был предложен метод упругих решений. Ильюшин ввёл дополнительную функцию omega для учёта пластических деформаций как отношение разности между напряжением в упругом состоянии и пластическом к напряжению в упругом состоянии. Эта функция при приближении к чисто упругому состоянию равна нулю. Используя эту функцию связь между напряжениями и деформациями приобретает добавку, которая зависит от omega. Получившиеся уравнения нелинейны и для их решения применяется метод последовательных приближений считая задачу упругости[60]. Биргер И. А. предложил другой итерационный метод решения задач пластичности называемый методом переменных параметров упругости, когда закон Гука переписывается с использованием переменными материальных параметров, которые зависят от координат[61]. Если разбить внешнюю нагрузку на малые части, то получение решение для такой задачи называется методом последовательных нагружений[62].
Экспериментальные методы
Для изучения напряжений в больших структурах могут использоваться метод электротензометрии. Тензорезисторы позволяют напрямую измерить деформации на поверхностях тела посредством электрических измерений. Чувствительный элемент изготавливается на подложке, которая приклеивается к исследуемому телу. Для измерений используют потенциометрическую и мостовую схемы[63]. Если изготовить модель из прозрачного материала с оптической анизотропией, то оптическими методами можно визуализировать напряжения в материале в поляризационном свете. Этот метод называется методом фотоупругости[64]. Существуют также другие оптические методы для получения изображений включающие голографическую интерферометрию[65], спекл-фотографию[66].
Для изучения упругих свойств двухмерных материалов используют иглу атомно-силового микроскопа. Для подвешенных круглых мембран знание кривой сила-смещение позволяет определять модуль Юнга, а при разрушении мембраны также прочность[67].
Круглые пластины с осесимметричным изгибом
Помимо прямоугольных пластин наибольший интерес представляют круглые пластины, так как уравнения для большого прогиба получаются проще, и поэтому можно найти больше аналитических решений. Так же как и для прямоугольной пластины круглые пластины должны быть сплошными с известным способом закрепления по краю. В случае осесимметричной внешней нагрузки уравнения равновесия и совместности напряжений можно вывести либо из геометрических соображений или при переходе из декартовой системы координат в цилиндрическую. Ось z направлена по вертикали проходящей через центр круга. Также координаты r и вводят обычным образом как радиус и полярный угол. Для осесимметричной нагрузки и для изотропной пластины в основных уравнениях не появляется зависимость от полярного угла, поэтому прогиб зависит только от радиуса[68]. Для круглой пластины можно составить три уравнения, равновесия используя полные дифференциалы[69]

-
(Ур. 8.1)

которое используются, чтобы ввести функцию напряжений по формулам[70]
-
(Ур. 8.2)

Уравнение совместности деформаций для круглой пластины имеет вид[71]
-
(Ур. 8.3)

Уравнение для моментов принимает вид
-
(Ур. 8.4)

где для поперечной силы Q можно записать следующее уравнение равновесие
-
(Ур. 8.5)

где — угол отсчитанный от оси z. Он определяется соотношением[71] — функция нагрузки[72]



-
(Ур. 8.6)

а q — интенсивность нагрузки. Напряжения в срединной плоскости определяются соотношениями
-
(Ур. 8.7)

-
(Ур. 8.8)

Выражения для моментов круглой пластины запишутся в виде[70]
-
(Ур. 8.9)

-
(Ур. 8.10)

которые можно подставить в уравнение равновесия для моментов, чтобы получить первое уравнение для больших прогибов круглых пластин с осесимметричной нагрузкой в виде
-
(Ур. 8.11)

из уравнения совместности деформаций можно получить второе уравнение[73]
-
(Ур. 8.12)

Функция напряжений, в эту систему нелинейных дифференциальных уравнений третьего порядка, входит как первая производная в оба уравнения. Тогда количество граничных условий можно сократить с шести до пяти.
Круглые пластины с начальным изгибом при осесимметричной внешней нагрузке
Уравнения для круглой пластинки при присутствии начального изгиба записываются в виде[74]


Вариационные уравнения для круглых пластин
Для вывода вариационных уравнений для круглых пластин рассматривают осесимметричную нагрузку и предполагают, что в точках контура пластинка закреплена, то есть нет перемещений, тогда . Также можно применить условия на изгибающие моменты на границе . Тогда для принципа возможных перемещений получают выражение[75]


-
(Ур. 8.13)

В методе Бубнова — Галёркина функцию прогиба представляют в виде ряда
-
(Ур. 8.14)

Подставление этого ряда в вышестоящее вариационное уравнение приводит к системе уравнений вида
-
(Ур. 8.15)

где X равно
-
(Ур. 8.16)

Выражение для круглой пластины с начальным изгибом первая производная прогиба по r заменяется на первую производную по r от суммы w+w0.
Примеры
Малые прогибы круглой равномерно нагруженной пластины закреплённой по контуру
Для малых прогибов решение уравнения 8.11 для равномерно нагруженной тонкой пластинки можно получить в общем виде[76]. Правая часть уравнения 8.11 будет содержать только вклад от внешней силы (qr/2), но не от прогиба. Полученное обыкновенное дифференциальное уравнение третьего порядка можно последовательно проинтегрировать получив общий вид решения для малых прогибов ws0[77]:
-
(Ур. 9.1)

где a — радиус пластинки, а три неизвестные константы Ci интегрирования должны быть определены из граничных условий. Если круглая пластинка защемлена по контуру, то первая производная (наклон) прогиба должна обращаться в ноль в центре и на краях пластины. C2 сразу даёт 0, так как первая производная логарифма в нуле расходится. C1 определяется из наклона прогиба при r=a, а C3 из ws0=0 при r=a. Тогда решение примет вид[78]
-
(Ур. 9.2)

Также доступно решение той же задачи для более точной теории с учётом касательных напряжений[79]

Большие прогибы круглой равномерно нагруженной пластины закреплённой по контуру
Для больших прогибов решение основной системы можно искать с помощью вариационных методов. В качестве пробной функции можно взять ws0 из предыдущего параграфа. Подставляя эту функцию в уравнение для деформаций (8.12), получают ОДУ для функции напряжений[80]

Это уравнение можно проинтегрировать дважды, чтобы получить выражение для первой производной функции напряжения в виде[81]

где C2=0 из-за симметрии и конечности производной в нуле. Отсутствие радиального смещения контура эквивалентно следующему граничному условию[74]

которое позволяет определить первую переменную интегрирования как[82]

Тогда первая производная функции напряжений известна и можно составить вариационное уравнение Бубнова — Галёркина

где введена безразмерная переменная . После взятия интеграла получают выражение связывающее прогибы f и внешнюю нагрузку q[83][84]


Хлопающая мембрана
Представляет интерес случай равномерной нагрузки закреплённой по контуру круглой пластинки с начальным прогибом. В качестве начального прогиба удобно взять решение для больших прогибов с фиксированной стрелой прогиба (максимальным прогибом при отсутствии внешней нагрузки) w0.

а пробную функцию в том же виде заданным уравнением (9.2). Для уравнения совместности деформаций с начальным прогибом можно получить уравнение

Интегрированием этого уравнения можно получить первую производную от функции напряжения[85]:

Уравнение Бубнова — Галёркина примет вид определённого интеграла (здесь аналогично ):

После интегрирования приходят к выражению[86]:

Здесь следует рассмотреть два случая ориентации начального прогиба: когда внешняя сила направлена по направлению начального прогиба, тогда прогибы складываются и решение монотонно; и когда против — тогда начальный прогиб нужно взять с отрицательным знаком. Соответственно интерес представляет решение задачи при наличии отрицательного знака, который приводит к возникновению хлопающего эффекта при достаточно большом отрицательном прогибе. На зависимости стрелы прогиба от приложенной внешней нагрузки сначала появляется линейный участок, который возникает при равенстве первой производной приложенной силы от стрелы прогиба, а при увеличении отрицательного начального прогиба наблюдаются два экстремума: максимум и минимум, а между ними существует несколько значений для стрелы прогиба при одном значением внешней силы[87].
Пластические деформации круглых пластин
Деформации делят на упругие и пластические, которые остаются при снятии внешней нагрузки. Соответственно, тела, которые способны выдерживать достаточно большие пластические деформации при сохранении непрерывности тела называют пластическими в отличие от хрупких тел, которые образуют разрывы связей даже при малых остаточных деформациях. На диаграмме растяжений (зависимость напряжения от деформации) можно выделить предел упругости тела , до которого тело сохраняет упругие свойства и предел прочности, при котором в теле формируются разрывы. Между ними находится точка предела текучести, которая характеризуется потерей упругости, но не потерей сплошности тела. Свойства пластического тела за пределом пластичности зависят от многих часто неизвестных факторов[88]. Теории пластичности разделяют на два вида по постановке. А именно, если напряжения связаны с деформациями, то теория называется теорией упругопластических деформаций, а в случае зависимости напряжения от скорости деформаций теория называется теорией пластических течений[89], которая, вообще говоря, имеет динамическую природу и соответственно основные физические (напряжения, деформации и их производные) величины имеют временные зависимости. Для малых деформаций эти теории дают одинаковые результаты, но применяют их в зависимости от пластических свойств исследуемых материалов. Существуют некоторые критерии перехода из упругого в пластическое состояние, общие для обоих теорий. Эти условия называют условиями текучести. В качестве допущения используется идея о связи состояния текучести и главных нормальных напряжений тела, которые не зависят от предыстории нагружения в упругом состоянии, то есть


В трёхмерном пространстве это выражение задаёт поверхность. Условие перехода к пластическому состоянию при достижении простого сдвига или простого растяжения задаётся поверхностью текучести[90]. Полную деформацию при превышении предела текучести рассматривают как сумму упругой и пластической частей.


В. В. Соколовский впервые рассмотрел упругопластическую деформацию круглых пластин под действием осесимметричной круговой нагрузки в 1944 году. Основываясь на критериях текучести Мизеса он исследовал возникновение пластических зон в тонких пластинках и установил предельную пластическую нагрузку, при которой в центе пластины возникает чисто пластическое состояние[91]. Он также определил критическую нагрузку при которой достигается предел текучести в крайних волокнах в центре пластины. При исследовании прогиба использовал численный расчёт. Оказалось, что пластическая деформация качественно отличается от таковой в одномерном случае, где возможно появление пластических шарниров — областей с концентрированными пластическими деформациями[92]. Аналитические решения в получили Охаши Ю. и др. для больших прогибов защемлённой круглой пластины при равномерной кольцевой нагрузке с учётом упругопластических деформаций[93].
Примечания
- Вольмир, 1956, p. 13.
- Вольмир, 1956, p. 14.
- Вольмир, 1956, p. 15.
- Вольмир, 1956, p. 386.
- Тимошенко, 1957, p. 50.
- Тимошенко, 1957, p. 146.
- Тимошенко, 1957, p. 147.
- Вольмир, 1956, p. 387.
- Тимошенко, 1957, p. 129.
- Тимошенко, 1957, p. 131.
- Тимошенко, 1957, p. 149.
- Тимошенко, 1957, p. 273.
- Тимошенко, 1957, pp. 292—293.
- Вольмир, 1956, p. 388.
- Вольмир, 1956, p. 389.
- Вольмир, 1956, p. 390.
- Way, S. Изгиб круглых пластин с большими перемещениями = Bending of Circular Plates with Large Deflection // Journal of Applied Mechanics. — 1934. — Т. 56. — С. 627—636.
- Alwar, R.S., and Nath, Y. Applications of Chebyshev Polynomials to the Nonlinear Analysis of Circular Plates // Int. J. Mech. Sci.. — 1976. — Т. 18. — С. 589—595. — doi:10.1016/0020-7403(76)90086-2.
- Alwar, R.S., and Reddy, B.S. Large Deflection Static and Dynamic Analysis of Isotropic and Orthotropic Annular Plates // International Journal of Non-Linear Mechanics. — 1979. — Т. 14. — С. 347—359. — doi:10.1016/0020-7462(79)90008-8.
- Соколовский В. В. Упруго-пластический изгиб круговой и кольцевой пластинок // ПММ. — 1944. — Т. 8. — С. 141—166.
- Sokolovsky, V. V. Elastic-Plastic Bending of Circular and Annular Plates // Prikladnaya Matematika i Mekhanika. — 1944. — Т. 8. — С. 141—166.
- Ohashi, Y., and Murakami, S. On the Elastic-Plastic Bending of a Clamped Circular Plate Under a Partial Circular Uniform Load // Bulletin, Japan Society of Mechanical Engineers. — 1964. — Т. 7. — С. 491—498.
- Вольмир, 1956, p. 16.
- Вольмир, 1956, p. 17.
- Вольмир, 1956, p. 18.
- Вольмир, 1956, p. 19.
- Вольмир, 1956, p. 20.
- Вольмир, 1956, p. 21.
- Вольмир, 1956, p. 25.
- Вольмир, 1956, p. 26.
- Вольмир, 1956, p. 27.
- Вольмир, 1956, p. 28.
- Вольмир, 1956, p. 29.
- Вольмир, 1956, p. 30.
- Вольмир, 1956, p. 31.
- Вольмир, 1956, p. 32.
- Вольмир, 1956, p. 33.
- Вольмир, 1956, p. 34.
- Вольмир, 1956, p. 35.
- Вольмир, 1956, p. 36.
- Вольмир, 1956, p. 37.
- Вольмир, 1956, p. 39.
- Вольмир, 1956, p. 40.
- Вольмир, 1956, pp. 42—43.
- Вольмир, 1956, p. 44.
- Вольмир, 1956, p. 45.
- Вольмир, 1956, p. 46.
- Вольмир, 1956, p. 50.
- Вольмир, 1956, p. 58.
- Вольмир, 1956, p. 61.
- Белкин & Гаврюшин, 2008, с. 5.
- Рикардс, 1988, с. 17.
- Белкин & Гаврюшин, 2008, с. 6.
- Белкин & Гаврюшин, 2008, с. 6—7.
- Bischoff, 2020, с. 913.
- Вольмир, 1956, p. 63.
- Вольмир, 1956, p. 64.
- Варданян и др., 1995, p. 477.
- Варданян и др., 1995, p. 488.
- Варданян и др., 1995, pp. 511—514.
- Варданян и др., 1995, pp. 514—515.
- Варданян и др., 1995, pp. 515—516.
- Варданян и др., 1995, p. 528.
- Варданян и др., 1995, p. 531.
- Варданян и др., 1995, p. 538.
- Варданян и др., 1995, p. 543.
- C. Lee, X. Wei, J. W. Kysar, J. Hone. Measurement of the Elastic Properties and Intrinsic Strength of Monolayer Graphene // Science. — 2008. — Т. 321. — С. 385—388.
- Вольмир, 1956, p. 171.
- Вольмир, 1956, p. 175.
- Вольмир, 1956, p. 177.
- Вольмир, 1956, p. 172.
- Вольмир, 1956, p. 176.
- Вольмир, 1956, p. 178.
- Вольмир, 1956, p. 179.
- Вольмир, 1956, pp. 183—185.
- Тимошенко, Войновский-Кригер, 1966, p. 70.
- Тимошенко, Войновский-Кригер, 1966, p. 71.
- Тимошенко, Войновский-Кригер, 1966, p. 72.
- Тимошенко, Войновский-Кригер, 1966, p. 91.
- Вольмир, 1956, p. 186.
- Вольмир, 1956, p. 187.
- Вольмир, 1956, p. 189.
- Вольмир, 1956, p. 188.
- Вольмир, 1956, p. 190.
- Вольмир, 1956, p. 205.
- Вольмир, 1956, p. 206.
- Вольмир, 1956, pp. 209—210.
- Соколовский, 1969, pp. 7—9.
- Соколовский, 1969, p. 39.
- Соколовский, 1969, p. 40.
- Фрейденталь & Гейрингер, 1962, с. 195.
- Фрейденталь & Гейрингер, 1962, с. 196.
- Ohashi & Murakami, 1964.
Литература
- Вольмир А. С. Гибкие пластинки и оболочки. — Москва: «Государственное издательство технико-теоретической литературы», 1956. — 419 с.
- Тимошенко С. П. История науки о сопротивлении материалов. — Москва: «Государственное издательство технико-теоретической литературы», 1957. — 536 с. — ISBN 5458506634.
- Соколовский В. В. Теория пластичности. — Москва: «Высшая школа», 1969. — 608 с.
- Тимошенко С. П., Войновский-Кригер С. Пластинки и оболочки = Theory of plates and shells. — Москва: «Наука», 1966. — 636 с.
- Биргер И. А., Мавлютов Р. Р. Сопротивление материалов. — Москва: «Наука», 1986. — 560 с.
- Chakrabarty, J. Applied Plasticity. — Springer, 2010. — 774 с. — ISBN 1461424828.
- Малинин Н. Н. Прикладная теория пластичности и ползучести. — Москва: «Машиностроение», 1975. — 400 с.
- Москвитин В. В. = Пластичность при переменных нагружениях. — Москва: «Издательство Московского университета», 1965. — 263 с.
- Варданян Г. С., Андреев В. И., Атаров Н. М., Горшков А. А. Сопротивление материалов с основами теории упругости и пластичности. — Москва: «АСВ», 1995. — 568 с. — ISBN 5878290146.
- Рикардс Р. Б. Метод конечных элементов в теории оболочек и пластин. — Рига: Знание, 1988. — 284 с. — ISBN 5-7966-0108-3.
- Белкин А. Е., Гаврюшин С. С. Расчет пластин методом конечных элементов : учеб.пособие. — M.: МГТУ им.Н. Э. Баумана, 2008. — 232 с. — ISBN 978-5-7038-3072-7.
- Фрейденталь А., Гейрингер Х. Математические теории неупругой сплошной среды. — М.: Физматгиз, 1962. — 432 с.
- Bischoff Manfred. Метод конечных элементов для пластин и оболочек (англ.) = Finite Elements for Plates and Shells // Altenbach H., Öchsner A. Encyclopedia of Continuum Mechanics. — Berlin, Heidelberg: Springer, 2020. — P. 898—920. — ISBN 978-3-662-55771-6. — doi:10.1007/978-3-662-55771-6_14.
