Теория упругости
Тео́рия упру́гости — раздел механики сплошных сред, изучающий деформации упругих твёрдых тел, их поведение при статических и динамических нагрузках.
Главная задача теории упругости — выяснить, каковы будут деформации тела и как они будут меняться со временем при заданных внешних воздействиях. Основной системой уравнений для решения этой задачи являются три уравнения равновесия, содержащие шесть неизвестных компонентов симметричного тензора напряжений. Симметричность тензора напряжений постулируется при этом гипотезой парности касательных напряжений. Для замыкания системы используют так называемые уравнения совместности деформаций (действительно, для тела, остающегося в процессе деформации сплошным, есть компоненты тензора деформации, которые не могут быть независимыми — эти компоненты выражаются через три функции — составляющие перемещения точки тела: симметричные соотношения Коши). Шесть уравнений совместности деформаций и уравнения обобщённого закона Гука замыкают задачу теории упругости.
Теория упругости является фундаментом инженерного дела и архитектуры. Кроме очевидных статических задач (устойчивость зданий и других сооружений, прочность транспортных средств), теория упругости привлекается и для решения динамических задач (например, устойчивость конструкций при землетрясениях и под действием мощных звуковых волн; виброустойчивость различных аппаратов и установок). Теория упругости здесь пересекается с материаловедением и служит одним из опорных пунктов при поиске новых материалов. Теория упругости важна также и для сейсморазведки.
Подходы к постановке задачи
Различают три варианта постановок задач теории упругости.
1. Постановка задач теории упругости в перемещениях
Основные неизвестные — три компоненты вектора перемещений (в дальнейшем — перемещения). Они должны удовлетворять трём уравнениям равновесия, записанным в перемещениях (уравнения Ламе). В каждой неособенной точке поверхности тела перемещения должны удовлетворять трём граничным условиям. Граничные условия могут быть сформулированы в трёх вариантах:
- заданы перемещения;
- заданы комбинации напряжений, записанные через нормальные и касательные производные от перемещений;
- заданы комбинации напряжений и перемещений, записанные через нормальные и касательные производные от перемещений и через сами перемещения.
По известным перемещениям деформации определяются дифференцированием (симметричные соотношения Коши). Найденные по перемещениям деформации тождественно удовлетворяют шести уравнениям совместности деформаций По известным перемещениям можно найти дифференцированием компоненты тензора поворотов и псевдовектора поворотов (антисимметричные соотношения Коши). По известным деформациям напряжения определяются алгебраически (уравнения закона Гука).
2. Постановка задач теории упругости в напряжениях. Основные неизвестные — шесть компонент симметричного тензора напряжений. Они должны удовлетворять трём уравнениям равновесия, записанным в напряжениях, и шести уравнениям совместности деформаций, записанным с помощью уравнений закона Гука в напряжениях. Деформации определяются алгебраически по найденным напряжениям из обратных уравнений закона Гука. Перемещения интегрируются в квадратурах по найденным деформациям с помощью формул Чезаро, причем интегрируемость обеспечена, так как удовлетворены уравнения совместности деформаций. Для упрощения постановки напряжения можно выразить через тензорный потенциал так, что уравнения равновесия будут удовлетворяться тождественно, а уравнения совместности распадутся на отдельные уравнения для каждой из компонент тензора-потенциала напряжений. Удерживая те или иные компоненты симметричного тензора-потенциала напряжений, а остальные полагая нулю, можно получить как частные случаи известные постановки Максвелла, Моррера, Эйри.
3. Постановка задач теории упругости в смешанном виде.
Основные понятия теории упругости
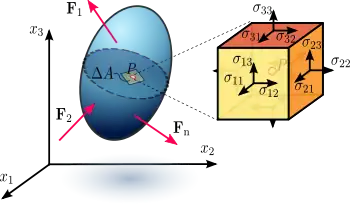
Основными понятиями теории упругости являются напряжения, действующих на малых площадях, которые можно мысленно провести в теле через заданную точку P, деформации в малой окрестности точки P и перемещения самой точки P. Точнее говоря, вводятся тензор напряжений , тензор малых деформаций и вектор перемещения ui.


Краткое обозначение , где индексы i, j принимают значения 1, 2, 3 (или x, y, z) следует понимать как матрицу в вида:

Аналогично следует понимать и краткое обозначение тензора .
Если физическая точка тела P вследствие деформации заняла новое положение в пространстве P', то вектор перемещения обозначается с компонентами (ux,uy,uz), или, сокращенно ui. В теории малых деформаций компоненты ui и считаются малыми величинами (строго говоря, бесконечно малыми). Компоненты тензора , который также называется тензор деформации Коши или линейный тензор деформации и вектора ui связаны зависимостями:


Из последней записи видно, что , поэтому тензор деформации является симметричным по определению.

Если упругое тело под действием внешних сил находится в равновесии (то есть скорости всех его точек равны нулю), то в равновесии находится и любая его часть, которую мысленно можно из него выделить. Из тела выделяется бесконечно малый прямоугольный параллелепипед, грани которого параллельны координатным плоскостям декартовой системы. Из условия равновесия параллелепипеда с размерами ребер dx, dy, dz, рассмотрев условия равновесия сил в проекциях, можно получить:

Аналогично получаются уравнения равновесия, выражающих равенство нулю главного момента всех сил, действующих на параллелепипед, которые приводятся к виду:

Это равенство означает, что тензор напряжений является симметричным тензором и число неизвестных компонент тензора напряжений сводится к 6. Есть только три уравнения равновесия, то есть уравнений статики недостаточно для решения задачи. Выход из положения состоит в том, чтобы выразить напряжение через деформации с помощью уравнений закона Гука, а затем деформации выразить через перемещения ui с помощью формул Коши, и результат подставить в уравнение равновесия. При этом получается три дифференциальных уравнения равновесия относительно трех неизвестных функций ux uy uz, то есть число неизвестных, будет соответствовать числу уравнений. Эти уравнения называются уравнениями Навье — Коши.



где параметры Ламе:

- .

Анизотропные однородные среды
Для анизотропных сред тензор жесткости сложнее. Симметрия тензора напряжений означает, что существует не более 6 различных элементов напряжений. Аналогично, существует не более 6 различных элементов тензора деформации . Следовательно, тензор жесткости четвёртого порядка может быть записан в виде матрицы (тензор второго порядка). Запись Фойгта является стандартным способом отображения для тензорных индексов,



С помощью этих обозначений можно записать матрицу упругости для любой линейно-упругой среды как:

Как показано, матрица симметрична. Это результат существования функции плотности энергии деформации, которая удовлетворяет . Следовательно, существует не более 21 различных констант .

Изотропный частный случай имеет 2 независимых элемента:

Простейший анизотропный случай кубической симметрии имеет 3 независимых элемента:

Случай поперечной изотропии, также называемой полярной анизотропией (с одной осью симметрии), имеет 5 независимых элементов:

Когда поперечная изотропия слаба (то есть близка к изотропии), альтернативная параметризация, использующая параметры Томсена, оказывается удобной для записи формул скоростей волн.
Случай ортотропии (симметрия кирпича) имеет 9 независимых элементов:

См. также
- Теория пластичности
- Тензор напряжений
- Тензор упругости
- Тензор деформации
- Закон Гука
Литература
- Болотин В. В. Динамическая устойчивость упругих систем. — М.: Гостехиздат, 1956. — 600 с.
- Ильюшин А. А. Механика сплошной среды. — М.: Изд-во Моск. ун-та, 1978. — 287 с.
- Лихачёв В. А., Малинин В. Г. Структурно-аналитическая теория прочности. — СПб.: Наука, 1993. — 471 с.
- Лурье А. И. Теория упругости. — М.: Наука, 1970. — 940 с.
- Пановко Я. Г., Губанова И. И. Устойчивость и колебания упругих систем: Современные концепции, ошибки и парадоксы. — М.: Наука, 1979. — 384 с.
- Работнов Ю. Н. Механика деформируемого твёрдого тела. — М.: Наука, 1979. — 744 с.
- Седов Л. И. Механика сплошной среды. Том 1.. — М.: Наука, 1970. — 492 с.
- Седов Л. И. Механика сплошной среды. Том 2.. — М.: Наука, 1970. — 568 с.
- Трусделл К. Первоначальный курс рациональной механики сплошных сред.. — М.: Наука, 1975. — 592 с.