Электромеханический фильтр
Электромехани́ческий фильтр (ЭМФ) — это фильтр, обычно используемый вместо электронного фильтра радиочастот, основное назначение которого — пропускать колебания в определённой полосе частот и подавлять остальные. В фильтре используются механические колебания, аналогичные подаваемому электрическому сигналу (это один из типов аналоговых фильтров). На входе и на выходе фильтра стоят электромеханические преобразователи, которые преобразуют электрические колебания сигнала в механические колебания рабочего тела фильтра и обратно.

Все компоненты ЭМФ по своим функциям аналогичны различным элементам электрической цепи. Математические функции-характеристики механических элементов идентичны характеристикам соответствующих электрических элементов. Это позволяет применить методы анализа электрических цепей и разработки фильтров к схемам с механическими фильтрами. В теории электрических цепей разработано много математических методов для расчёта частотной характеристики фильтра, и разработчики механического фильтра напрямую использовали их. Это необходимо для того, чтобы характеристики механического фильтра соответствовали требуемым характеристикам электрической схемы.
Детали ЭМФ обычно выполняются из стали или из железо-никелевых сплавов. Никель обычно используется на входных и выходных выводах фильтра. Резонаторы фильтра, сделанные из этих материалов, перед окончательной сборкой фильтра проходят обработку на специальном высокоточном станке, чтобы придать им требуемые частотные характеристики.
Поскольку ЭМФ работает как электромеханическое устройство, при его разработке полностью применимы методы механического конструирования устройств для фильтрации механических колебаний или звуковых волн (которые тоже являются механическими колебаниями). Такие методы используются, например, при разработке корпусов громкоговорителей. В электрических приложениях, в дополнение к механическим компонентам с характеристиками электрических деталей, нужны преобразователи механических колебаний в электрические и обратно. Существует множество различных форм компонентов и топологий механических фильтров, репрезентативная выборка которых приводится в данной статье.
Теория электромеханических фильтров впервые была применена для совершенствования механических частей граммофонов в 1920-х годах. В 1950-х годах ЭМФ начали выпускаться как самостоятельные изделия для использования в радиопередатчиках и высококачественных радиоприёмниках. Высочайшая добротность механических резонаторов, намного превысившая добротность любых обычных (на конденсаторах и катушках индуктивности) колебательных контуров, позволила создавать механические фильтры с превосходной избирательностью. Высокая чувствительность, важная для радиоприёмников, также сделала эти фильтры очень привлекательными для использования. Современные исследователи занимаются разработкой микроэлектромеханических фильтров — электромеханических аналогов интегральных микросхем.
Элементы
Элементами пассивной линейной электрической схемы являются катушки индуктивности, конденсаторы и резисторы, свойствами которых являются соответственно индуктивность, электрическая жёсткость (величина, обратная ёмкости) и сопротивление. Им соответствуют масса, жёсткость и затухание. В большинстве схем электронных фильтров используются только конденсаторы и катушки индуктивности, а резисторы могут быть на входе и выходе фильтра. В идеальном фильтре сопротивление может отсутствовать; в реальном оно всегда есть в виде сопротивления обмотки катушки индуктивности, сопротивления монтажа и т. д. Подобно этому, элементы идеального механического фильтра обладают только массой и жёсткостью, но в реальном всегда присутствует затухание колебаний[1].
Таким же образом, механическим аналогом напряжения и силы тока можно считать силу (F) и скорость (v). Отсюда, механический импеданс (англ. mechanical impedance) может быть определён в терминах мнимой угловой частоты jω,[прим. 1] которая полностью следует электрической аналогии[2]:1-2[3].
| Механический параметр | Формула | Механическое сопротивление (импеданс) | Электрический параметр |
|---|---|---|---|
| Жёсткость, S | Электрическая жёсткость, 1/C, обратная электрическая ёмкость | ||
| Масса, M | Индуктивность, L | ||
| Затухание, D | Сопротивление, R |






Примечания:
- Переменные x, t, и a означают, как обычно, расстояние, время и ускорение соответственно.
- Механическую физическую величину податливость, обратную жёсткости, можно использовать вместо жёсткости, чтобы дать более прямое соответствие ёмкости, но в таблице используется жёсткость, как более привычная величина.
Схема, представленная в таблице выше, известна как аналогия полного сопротивления (англ. impedance analogy). На её основе строятся эквивалентные электрические принципиальные схемы ЭМФ, полное электрическое сопротивление которых соответствует полному сопротивлению ЭМФ, рассматриваемого как часть электрической цепи. Такие схемы интуитивно более понятны с точки зрения радиоэлектроники. Также существует аналогия мобильности (англ. mobility analogy)[прим. 2], в которой физическая сила соответствует силе электрического тока, а скорость — электрическому напряжению. Аналогия мобильности даёт эквивалентные правильные результаты, но требует использования не тех электрических аналогов, которые были указаны выше, а обратных к ним величин. Откуда M → C, S → 1/L, D → G, где G — электрическая проводимость, обратная сопротивлению. Эквивалентные схемы, построенные с использованием аналогии мобильности, подобны тем, которые построены с использованием аналогии полного сопротивления. Но вместо полного сопротивления используется обратная к нему величина — полная проводимость (обратный импеданс), и в эквивалентной схеме последовательные элементы становятся параллельными, ёмкости заменяются индуктивностями и так далее[4]. Схемы, построенные с использованием аналогии мобильности, ближе к схеме механической компоновки ЭМФ, и интуитивно более понятны с точки зрения механики[5].
Любой механический компонент неизбежно обладает массой и жёсткостью. Механические аналоги сосредоточенных ёмкостей и индуктивностей могут быть сделаны через минимизацию (но не полное исключение) нежелательного свойства. Аналогом конденсатора может быть тонкий длинный стержень, с минимальной массой и максимальной податливостью. Аналог катушки индуктивности, наоборот — короткий и широкий брусок, с максимальной массой и минимальной податливостью.[2]:1
Механические части работают как длинная линия для механических колебаний. Если длина волны короткая по сравнению с размерами детали, вышеописанная модель элементов с сосредоточенными параметрами (англ. Lumped element model) становится неадекватной, и вместо неё следует использовать модель с распределёнными параметрами (англ. Distributed element model). Механические детали с распределёнными параметрами здесь полностью аналогичных электрическим элементам с распределёнными параметрами, и разработчик электромеханических фильтров может применять методы расчёта фильтров на элементах с распределёнными параметрами (англ. Distributed element filter).[2]
История
Гармонический (акустический) телеграф
Конструирование электромеханических фильтров развивалось благодаря применению к механизмам некоторых методов теории электрических фильтров. Однако, одним из самых ранних (1870-е годы) примеров практического применения ЭМФ стал гармонический, или акустический, телеграф, который был создан потому, что в те времена электрический резонанс был ещё мало изучен, а механический резонанс (особенно акустический резонанс) был хорошо известен инженерам. Такое положение дел не продлилось долго; электрический резонанс уже был известен науке, и вскоре инженеры стали разрабатывать полностью электрические конструкции фильтров. Но в то время гармонический телеграф был достаточно важным. Идея передавать по одной телеграфной линии на разных частотах несколько телеграмм одновременно (сейчас это называется частотным разделением каналов) помогла существенно сократить расходы на строительство телеграфных линий. Телеграфный ключ каждого оператора включал электромеханическое реле, язычок которого колебался на определённой частоте и преобразовывал это механическое колебание в электрический сигнал. У принимающего телеграмму оператора стояло такое же реле, точно настроенное на нужную звуковую частоту; оно начинало вибрировать и издавать звук только под действием электрического сигнала нужной частоты[6][7].
Разные модели гармонического телеграфа были разработаны Элишей Греем (Elisha Gray), Александром Беллом, Эрнстом Меркадиером (Ernest Mercadier) и другими. Таким образом, были открыты способы преобразования звуковых колебаний в электрические и обратно, что в дальнейшем привело к изобретению телефона[6][7].
Механические эквивалентные цепи
Вскоре после разработки анализа электрических цепей, понятия комплексного импеданса и представления из теории фильтров стали по аналогии применяться и в механике. А. Кеннели (Arthur E. Kennelly), который также ввёл в употребление понятие комплексного импеданса, и А. Вебстер (Arthur Gordon Webster) в 1920 году впервые распространили концепцию импеданса на механические системы[8].
Механические аналогии полной комплексной проводимости и ассоциированной подвижности (англ. associated mobility) начали использоваться несколько позже, в 1932 году благодаря Файрстоуну (Firestone)[9][10][11].
Но одного только введения механических аналогов электрических величин было не достаточно. Они были применимы к полностью механическим системам; но при расчётах ЭМФ так же требуется учитывать влияние электромеханических преобразователей, насколько возможно. А. Пуанкаре ещё в 1907 году впервые описал преобразователь с помощью пары линейных алгебраических уравнений, связывающих электрические переменные (напряжение и силу тока) с механическими переменными (силой и скоростью)[12][13]. Эти уравнения можно записать в матричной форме, используя z-параметры четырёхполюсника:

где I и v — соответственно сила тока и электрическое напряжение на электрической стороне преобразователя.
Такая запись уравнений, одинаково хорошо описывающих механический и электрический импеданс, впервые была предложена Р. Л. Вегелем (R. L. Wegel) в 1921 году. В них — это механический импеданс холостого хода, т.е. импеданс механической стороны преобразователя при отсутствии тока на выводах электрической стороны преобразователя. Другой элемент матрицы четырёхполюсника — — это электрический импеданс холостого хода, то есть входное сопротивление электрической стороны преобразователя, измеряемое тогда, когда механическая сторона преобразователя зафиксирована и неподвижна (скорость равна нулю). Оставшиеся два элемента, и , описывают соответственно прямую и обратную передаточную функцию электромеханического преобразователя.




С появлением таких представлений, инженеры получили возможность применять методы расчёта электрических цепей к механическим доменам и анализировать электромеханическую систему как единое целое[8][12][14].
Воспроизведение звука
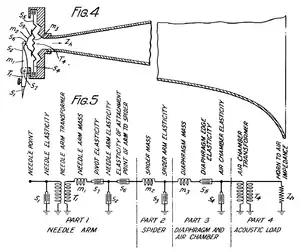
Одним из ранних практических приложений новых теоретических разработок стали расчёты граммофонов. Частой проблемой в ранних разработках граммофонов были механические резонансы в системе звукоснимателя и звукопередачи; в результате на амплитудно-частотной характеристике (АЧХ) граммофона появлялись чрезмерно большие пики и впадины, что заметно снижало качество звука. В 1923 году Харрисон (англ. Harrison), работавший в компании «Western Electric», получил патент на граммофон, в котором расчёты механической акустической системы целиком основывались на эквивалентной электрической цепи. Акустическая система граммофона была представлена как электрическая линия передачи, рупор граммофона — как активная нагрузка на её выходе. Всем механическим и акустическим деталям граммофона — от иглы звукоснимателя до рупора — были сопоставлены на основе аналогии импеданса эквивалентные электрические элементы с сосредоточенными параметрами. Эквивалентная электрическая цепь имела лестничную топологию (англ. ladder topology) и представляла собой последовательность резонансных контуров, шунтированных конденсаторами. Так же её можно рассматривать как схему полосового фильтра. И Харрисон так подобрал значения параметров элементов такого фильтра, чтобы обеспечить желаемую полосу пропускания звуковых частот (в данном случае от 100 Гц до 6 кГц) и плоскую АЧХ. Пересчитывая электрические параметры элементов эквивалентной электрической цепи обратно в механические параметры, можно было вычислить требуемые массы и жёсткости деталей граммофона, а затем и соответствующие размеры деталей для их изготовления. Получившийся в результате граммофон имел плоскую АЧХ во всей полосе пропускания, и был свободен от паразитных резонансов на некоторых звуковых частотах, столь характерных для предыдущих конструкций граммофонов[15]. Вскоре после этого Харрисон получил ещё один патент — на подобную методологию расчёта микрофонов и телефонов для телефонных аппаратов[16].

Харрисон использовал теорию k-фильтров (англ. «constant k filter» или «image filter») Кампбелла (G. A. Campbell), которая в то время была наиболее разработанной теорией фильтров. В этой теории расчёт фильтров рассматривался, по существу, как проблема согласования полного сопротивления (импеданса)[15]:2. Более развитая теория решения этой проблемы была предложена Эвардом Нортоном (Edward L. Norton), в 1929 году работавшим в «Bell Labs». Э. Нортон использовал тот же самый общий подход, хотя позднее он написал Сиднею Дарлингтону о том, что смог разработать «максимально плоский» механический фильтр[1]. Конструкция Нортона появилась раньше аналогичной, описанной в работе Стефана Баттерворта, которого обычно считают первооткрывателем электронного фильтра с максимально плоской АЧХ[17].
Уравнения, которые Нортон приводит для своего фильтра, соответствуют односторонне нагруженному фильтру Баттерворта, подключённого к идеальному источнику напряжения (без внутреннего сопротивления). В то время как в литературе чаще приводится расчёт двусторонне нагруженного фильтра, с резисторами на входе и на выходе. Поэтому трудно сказать, для какой конструкции стоит применять такую модель[2]:3[18]. Другая особенность фильтра Нортона — последовательно включённый конденсатор, соответствующий жёсткости на акустической диаграмме. В эквивалентной схеме Нортона такой конденсатор только один, и без него фильтр можно анализировать как фильтр-прототип низких частот. Нортон перемещает конденсатор из внутренней схемы фильтра на его вход, из-за чего приходится вводить в эквивалентную схему трансформатор (рис. 3, внизу). Нортон использовал схему преобразования эквивалентного сопротивления «L-перевёрнутая» (англ. turning round the L)[2].
Окончательное количественное описание ЭМФ в то время было дано в работе Максфилда и Харрисона (англ. Maxfield and Harrison), изданной в 1926 году. В ней авторы не только описали, как можно применить механический полосовой фильтр в системах воспроизведения звука, но также применили те же принципы к разработке механических звукозаписывающих систем, привели схему усовершенствованной звукозаписывающей головки (для записи на грампластинки)[19][20][21].
Серийное производство
Крупносерийное производство электромеханических фильтров впервые было осуществлено компанией «Collins Radio Company» (ныне «Rockwell Collins, Inc») в 1950-х годах. Первоначально они были разработаны для применения в телефонии для частотного разделения каналов — именно там использование высококачественных фильтров приносило коммерческую выгоду. Точность и крутизна АЧХ ЭМФ позволяла снизить ширину защитной полосы частот, разделяющей частотные каналы, в результате чего стала возможной передача большего числа телефонных разговоров по одному кабелю. Этот же принцип частотного разделения каналов широко используется и в радиопередатчиках — по той же причине. Электромеханические фильтры быстро получили распространение в трактах промежуточной частоты высококачественных радиосистем ОВЧ и УВЧ диапазонов (в том числе военных, морских, радиолюбительских и других). Их преимуществом была значительно бо́льшая, чем у эквивалентных LC-фильтров, добротность, позволяющая достичь высокой избирательности, необходимой для разделения близких по частоте радиосигналов в приёмниках. Другим преимуществом ЭМФ стала более высокая, чем у LC-фильтров и монолитных кварцевых фильтров, стабильность. Наиболее популярным ЭМФ для радиоприёмников был фильтр с торсионным резонатором, потому что промежуточная частота в них обычно выбирается в диапазоне от 100 до 500 кГц[22][23].
Электромеханические преобразователи
а Магнитострикционный преобразователь.
б Пьезоэлектрический преобразователь Ланжевена.
в Торсионный пьезоэлектрический преобразователь.
В электромеханических фильтрах используются как магнитострикционные, так и пьезоэлектрические электромеханические преобразователи (ЭМП). В современных ЭМФ предпочтение отдаётся пьезоэлектрическим преобразователям, т.к. пьезоэлектрик может быть одновременно использован как резонатор, что позволяет уменьшить количество деталей и размер фильтра. Кроме того, магнитострикционный ЭМФ чувствителен к внешним магнитным полям, а на работу пьезоэлектрического фильтра они практически не влияют.[24]
Магнитострикционные преобразователи (магнитострикторы)
Магнитострикционный материал — это материал, который меняет форму под воздействием магнитного поля, и, наоборот, создаёт магнитное поле, будучи деформированным. В магнитострикционном ЭМП требуется проводящая катушка вокруг магнитострикционного материала. Катушка с током на входе фильтра создаёт переменное магнитное поле, приводящие в движение входной магнитостриктор (рис. 4-a). В выходной катушке создаётся ток под действием магнитного поля, созданного выходным магнитостриктором, вследствие индукции. Часто также используется постоянный магнит для того, чтобы поддерживать напряжённость магнитного поля в магнитострикционном материале в рабочем диапазоне. С этой же целью можно использовать и постоянный ток, пропускаемый через катушку одновременно с сигналом — но такое конструктивное решение используется сравнительно редко[25].
Магнитострикционные материалы, обычно применяемые в ЭМП ЭМФ — это ферриты (спрессованный порошок соединений железа). Часто используются резонаторы со стальной или железо-никелевой обмоткой; но в некоторых конструкциях (особенно старых) никелевая проволока может быть использована для входных и выходных выводов фильтра. Это потому, что можно намотать обмотку преобразователя на спаренную с ней никелевую проволоку, т.к. никель обладает слабыми магнитострикционными свойствами. Однако конструкция со спаренными обмоточными проводами является довольно слабой. Другой её недостаток — вихревые токи, которых можно избежать, если вместо никеля использовать феррит[25].
Обмотка преобразователя, конечно, добавляет некоторую индуктивность в электрическую цепь с ЭМФ. Чтобы её скомпенсировать, обычно подключают конденсатор параллельно входу (выходу) фильтра, а в некоторых моделях электромеханических фильтров такой конденсатор является встроенным. Тем самым формируется дополнительный резонатор (параллельный колебательный LC-контур). Как правило, полоса пропускания такого колебательного контура много шире, чем у механического резонатора, поэтому на АЧХ ЭМФ этот шунтирующий конденсатор почти не оказывает влияния; однако компенсация реактивной составляющей входного и выходного сопротивления даёт определённые преимущества: так ЭМФ лучше согласуется с линией передачи и другими элементами цепи[26]:c.2, l.14–17.
Пьезоэлектрические преобразователи
Пьезоэлектрики меняют свою форму под действием электрического поля, а также создают электрическое поле, будучи деформированными. Пьезоэлектрический преобразователь, по существу, делается путём помещения электродов в пьезоэлектрический материал. Пьезоэлектрики, использовавшиеся в ранних ЭМП, например, титанат бария, имели недостаточную температурную стабильность. Из-за этого пьезоэлектрический преобразователь не мог одновременно выполнять функции резонатора, и резонатор приходилось делать отдельно. Эта проблема разрешилась, когда начали использовать цирконат-титанат свинца (ЦТС), достаточно стабильный для использования в резонаторе. Другой материал, часто применяемый в электромеханических фильтрах — кварц. Однако керамические материалы, такие как ЦТС, более предпочиттельны, так как коэффициент электромеханической связи у них выше, чем у кварцевых[27].
Существуют различные типы пьезоэлектрических электромеханических преобразователей. Один из них — преобразователь Ланжевена, названный по имени известного французского физика Поля Ланжевена, который использовал подобный ЭМП в своих ранних разработках гидролокатора. Преобразователь Ланжевена хорошо возбуждает продольные моды звуковых колебаний. Поэтому его можно использовать с резонаторами, настроенными на продольные моды либо с резонаторами, в которых колебания с другими модами могут быть механически преобразованы в продольные колебания. Обычно ЭМП Ланжевена делается в виде пьезоэлектрического диска, помещённого между двумя одинаковыми стержнями, которые образуют резонатор (рис. 4-б).[28]
В другом типе ЭМП слой пьезоэлектрика располагается не поперёк, а вдоль резонатора (рис. 4-в). В этой конструкции рабочими являются торсионные акустические колебания, потому такой ЭМП называется торсионным[29].
Резонаторы
| материал | добротность |
|---|---|
| Никель | до 100[30] |
| Сталь | до 1000[30] |
| Алюминий | ~10000[30] |
| Железоникелевые сплавы | 10000-25000, в зависимости от конструкции[31] |
Механические резонаторы позволяют достичь крайне высокой добротности: около 10000 в большинстве ЭМФ, и до 25000 в фильтрах с торсионными резонаторами, изготовленными из специального железоникелевого сплава. Такой добротности практически невозможно достичь в обычном колебательном контуре, где она ограничена активным сопротивлением обмотки катушки индуктивности.[25][31][32]
В ранних конструкциях (1940-е — 1950-е годы) использовались стальные резонаторы. В дальнейшем сталь уступила место железоникелевым сплавам, которые, хоть и стоят дороже, но позволяют получить максимальную добротность. Некоторые металлы, используемые в резонаторах электромеханических фильтров, и обеспечиваемые ими значения добротности приведены в таблице[31].
Иногда в качестве резонатора используется пьезоэлектрический кристалл, особенно в компактных моделях ЭМФ, где пьезоэлектрик является одновременно и резонатором, и входным/выходным электромеханическим преобразователем[31].
Другое преимущество ЭМФ перед LC-контуром — высокая стабильность. Достижимо относительное отклонение резонансной частоты от номинала, не превышающее 1,5·10–9 во всём рабочем диапазоне температур — от минус 25 до +85 °C, и при этом временна́я относительная нестабильность частоты не превысит 4·10–9 за сутки[33]. Температурная стабильность частоты — ещё одна причина использования железоникелевого сплава в резонаторе ЭМФ. Она напрямую связана со стабильностью модуля Юнга — меры жёсткости материала; температурный коэффициент модуля Юнга (ТКМЮ) должен быть как можно ближе к нулю. Большинство материалов обладают отрицательным ТКМЮ (при нагревании материал становится менее жёстким), но добавлением некоторых элементов в сплав можно добиться нулевого или положительного ТКМЮ[прим. 3]. В резонаторе предпочтительнее использовать материал, ТКМЮ которого в рабочем диапазоне температур равен или близок к нулю. Такой материал можно получить с помощью термической обработки сплава, которая меняет функцию зависимости ТКМЮ от температуры[34][35][36][37].
Моды колебаний в резонаторах

а) вторая продольная мода с одним неподвижно закреплённым краем; б) первая торсионная мода; в) вторая торсионная мода; г) вторая мода изгиба; д) первая мода радиального растяжения; е) первая радиально-симметричная циркулярная мода[34].
Обычно в механическом резонаторе могут возбуждаться различные моды колебаний деформации и механического напряжения, но в резонаторе ЭМФ только одна из них является рабочей, и обычно конструктор старается добиться того, чтобы резонанс возникал только на рабочей моде, а другие моды колебаний не возбуждались. Используются как деформации продольного растяжения/сжатия, так и деформации изгиба и кручения. Иногда используются колебательные деформации радиального растяжения/сжатия или циркулярно-поляризованные колебания (типа колебаний в круглой мембране)[38].
Моды колебаний нумеруются соответственно количеству полуволн, помещающихся на соответствующем размере резонатора. Если мода связана с колебательным движением более чем в одном направлении (например, циркулярно-поляризованные колебания круглой мембраны осуществляются в двух направлениях одновременно) — она обозначаются несколькими числами. На высших модах колебаний в резонаторе образуется несколько узлов колебаний — неподвижных точек (минимумы стоячей волны). В некоторых моделях механических резонаторов в узлах колебаний устанавливаются дополнительные опоры или крепления для большей прочности конструкции. На рисунке 5 узлы колебаний обозначены пунктирной линией, а дополнительные механические элементы — присоединёнными к ним отрезками проволоки. Присоединение дополнительных механических деталей к резонатору в узлах колебаний не препятствует работе резонатора и не мешает возбуждению колебаний рабочей моды.
Конструкции электромеханических цепей





В конструкции электромеханического фильтра может быть использовано множество различных сочетаний резонаторов и электромеханических преобразователей. На рисунках показаны некоторые из них. Так, на рис. 6 изображён ЭМФ с изгибными дисковыми резонаторами и магнитострикционными ЭМП. Электромеханический преобразователь передаёт колебания на центр первого резонатора. На резонансной частоте (или вблизи неё) края диска-резонатора колеблются в противофазе с его центром, и это колебание передаётся через стержни следующему резонатору. При значительном отклонении от резонансной частоты, края диска будут слабо колебаться, и фильтр будет «резать» (не пропускать через себя) такой сигнал[39].
См. также
Примечания
- Примечание переводчика: скорее всего, имеется в виду комплексная угловая частота затухающих гармонических колебаний , где — вещественная угловая частота колебаний (), а — коэффициент затухания. Тогда уравнение колебаний запишется в общем виде как
- Аналогия полного сопротивления — наиболее часто используемый подход (см. Gatti, Paolo L.; Ferrari, Vittorio. Applied Structural and Mechanical Vibrations: Theory, Methods, and Measuring Instrumentation. — London: Taylor&Francis, 1999. — pp. 630–632); но среди тех, кто использует аналогию мобильности, есть ведущий производитель ЭМФ «Rockwell Collins, Inc.» (Johnson, 1968, p. 41)
- См., например «Thermelast 4002»® Архивная копия от 16 сентября 2016 на Wayback Machine (нем.) — запатентованный сплав, впервые полученный 8 апреля 2010 г. в Германии. Первым сплавом с такими свойствами был элинвар. За открытие элинвара и инвара Шарль Гийом был удостоен Нобелевской премии 1920 года; первым практическим применением открытых им сплавов стали температурные компенсаторы в научных измерительных инструментах, часах и морских хронометрах (Gould, Rupert T. The Marine Chronometer. — London: Holland Press, 1960. — p. 201).





Сноски
- Darlington, 1984, p. 7.
- Norton, Edward L. «Sound reproducer», U.S. Patent 1 792 655, filed 31 May 1929, issued 17 February 1931.
- Talbot-Smith, 2001, pp. 1.85, 1.86.
- Taylor&Huang, 1997, pp. 378–379.
- Eargle, 2003, pp. 4–5.
- Lundheim, 2002, p. 24.
- Blanchard, 1944, p. 425.
- Hunt, 1954, p. 66.
- Hunt, 1954, p. 110.
- Pierce, 1989, p. 321.
- Firestone, 1932, pp. 249–267.
- Pierce, 1989, p. 200.
- Poincaré, 1907, pp. 221–372.
- Wegel, 1921, pp. 791–802.
- Harrison, Henry C. «Acoustic device», U.S. Patent 1 730 425, filed 11 October 1927 (and in Germany 21 October 1923), issued 8 October 1929.
- Harrison, H. C. «Electromagnetic system», U.S. Patent 1 773 082, filed 6 December 1923, issued 12 August 1930.
- Butterworth, 1930, pp. 536–541.
- Matthaei, 1964, pp. 104–107.
- Taylor&Huang, 1997, p. 360.
- Hunt, 1954, p. 68.
- Maxfield, 1926, pp. 493–523.
- Taylor&Huang, 1997, p. 359.
- Carr, 2002, pp. 54-55.
- Taylor&Huang, 1997, p. 387.
- Carr, 2002, pp. 170-172.
- Mason, Warren P. "Electromechanical wave filter", U.S. Patent 2 981 905, filed 20 August 1958, issued 25 April 1961.
- Rosen, 1992, pp. 290–291, 331.
- Rosen, 1992, pp. 293–296, 302.
- Rosen, 1992, p. 302.
- George, col.1.
- Lin, 1998, p. 286.
- Talbot-Smith, 2001, p. 380.
- Carr, 2002, p. 171.
- Taylor&Huang, 1997, p. 380.
- Manfred Börner, Jürgen Spizner, "Mechanical frequency filter with additional coupling to increase slope of damping rise", col.4, U.S. Patent 3 445 792, filed 28 June 1963, issued 20 May 1969.
- Alfhart Günther, "Method for aligning mechanical filters", col.2, U.S. Patent 3 798 077, filed 24 September 1971, issued 19 March 1974.
- Schneider, Wolfgang; Thomas, Hans. Constant modulus alloys for mechanical oscillators (англ.) // Metallurgical Transactions A : journal. — 1979. — Vol. 10, no. 4. — P. 433. — doi:10.1007/BF02697070. — .
- Taylor&Huang, 1997, pp. 392–393.
- baselec, 1973, p. 450.
Литература
Русскоязычная
- Голубцов М. Г. Электромеханические фильтры радиочастот. — М.: Госэнергоиздат, 1957.
- Шульгин К. Электромеханический фильтр для SSB // Радио : журнал. — 1964. — № 1. — С. 22—24.
- Шульгин К. Электромеханический фильтр для SSB // Радио : журнал. — 1964. — № 2. — С. 16—17.
- Шульгин К. Основные параметры дисковых ЭМФ на частоту 500 кГц // Радио : Жур. — 2002. — № 5. — С. 59—61.
Англоязычная
- Blanchard, J. The history of electrical resonance (англ.) // Bell System Technical Journal : журнал. — 1944. — Vol. 23. — P. 415—433.
- Butterworth, S. On the Theory of Filter Amplifiers (англ.) // Wireless Engineer : журнал. — 1930. — No. 7. — P. 536—541.
- United States. Bureau of Naval Personnel. Rate training manual // Basic Electronics. — Courier Dover Publications, 1973. — (Dover Books on Electronics, Electricity, Computers, Electrical Engineering Series). — ISBN 0-486-21076-6.
- Carr, Joseph J.; Radio Society of Great Britain. RF components and circuits. — Oxford: Newnes, 2002. — (Electronics & Electrical, Referex Engineering). — ISBN 0-7506-4844-9.
- Darlington, S. A history of network synthesis and filter theory for circuits composed of resistors, inductors, and capacitors (англ.) // IEEE Transactions on Circuits and Systems : журнал. — 1984. — Vol. 31. — P. 3. — doi:10.1109/TCS.1984.1085415.
- Eargle, John. Loudspeaker handbook. — 2-е илл.. — Boston: Kluwer Academic Publishers, 2003. — ISBN 1-4020-7584-7.
- Firestone, F. A. A new analogy between mechanical and electrical systems (англ.) // Journal of the Acoustical Society of America : журнал. — 1932. — Vol. 4. — P. 249—267.
- Gatti, Paolo L.; Ferrari, Vittorio. Applied Structural and Mechanical Vibrations: Theory, Methods, and Measuring Instrumentation. — London: Taylor & Francis, 1999. — ISBN 0-419-22710-5.
- George, R. W. "Mechanically resonant filter devices", U.S. Patent 2 762 985, filed 20th Sep 1952, issued 11th Sep 1956.
- Gould, Rupert T. The Marine Chronometer. — London: Holland Press, 1960.
- Harrison, Henry C. «Acoustic device», U.S. Patent 1 730 425, filed 11 October 1927 (and in Germany 21 October 1923), issued 8 October 1929.
- Harrison, H. C. «Electromagnetic system», U.S. Patent 1 773 082, filed 6 December 1923, issued 12 August 1930.
- Héctor, J. de los Santos. RF MEMS Circuit Design for Wireless Communications. — Boston: Artech House. — (Microelectromechanical systems series). — ISBN 1-58053-329-9.
- Hunt, Frederick V. Electroacoustics: the Analysis of Transduction, and its Historical Background. — Cambridge: Harvard University Press, 1954.
- Johnson, R. A. Electrical circuit models of disk-wire mechanical filters (англ.) // IEEE Transactions: Sonics and Ultrasonics : журнал. — 1968. — Vol. 15, iss. 1. — P. 41—50. — ISSN 0018-9537.
- Johnson, Robert A. Mechanical filters in electronics. — New York: Wiley, 1983. — ISBN 0-471-08919-2.
- Kasai, Yoshihiko; Hayashi, Tsunenori, "Automatic frequency adjusting method for mechanical resonators", U.S. Patent 4 395 849, filed 22 October 1980, issued 2 August 1983.
- Levy, R.; Cohn, S. B. A History of microwave filter research, design, and development (англ.) // IEEE Transactions: Microwave Theory and Techniques : журнал. — 1984. — Vol. 32, no. 9. — P. 1055—1067.
- Lin, Liwei; Howe, Roger T.; Pisano, Albert P. Microelectromechanical filters for signal processing (англ.) // Journal of Microelectromechanical Systems : журнал. — 1998. — Vol. 7, no. 3. Архивировано 19 июля 2011 года.
- Lundheim, L. On Shannon and "Shannon's formula" (англ.) // Telektronikk : журнал. — 2002. — Vol. 98, no. 1. Архивировано 24 июля 2011 года.
- Mason, Warren P. "Electromechanical wave filter", U.S. Patent 2 981 905, filed 20 August 1958, issued 25 April 1961.
- Matthaei, George L.; Young, Leo; Jones, E. M. T. Microwave Filters, Impedance-Matching Networks, and Coupling Structures. — New York: McGraw-Hill, 1964.
- Maxfield, J. P.; Harrison, H. C. Methods of high quality recording and reproducing of music and speech based on telephone research (англ.) // Bell Systems Technical Journal : журнал. — 1926. — No. 5.
- Norton, Edward L. «Sound reproducer», U.S. Patent 1 792 655, filed 31 May 1929, issued 17 February 1931.
- Pierce, Allan D. Acoustics: an introduction to its physical principles and applications. — 3-е илл.. — New York: Acoustical Society of America, 1989. — ISBN 0-88318-612-8.
- Poincaré, H. Study of telephonic reception // Eclairage Electrique : журнал. — 1907. — Т. 50. — С. 221—372.
- Rosen, Carol Zwick; Hiremath, Basavaraj V.; Newnham, Robert Everest. Piezoelectricity. — New York: American Institute of Physics, 1992. — Vol. 5. — (Key papers in physics). — ISBN 0-88318-647-0.
- Talbot-Smith, Michael. Audio Engineer's Reference Book. — Oxford: Focal Press, 2001. — ISBN 0-240-51685-0.
- Taylor, John T.; Huang, Qiuting. CRC Handbook of Electrical Filters. — Boca Raton: CRC Press, 1997. — ISBN 0-8493-8951-8.
- Wegel, R. L. Theory of magneto-mechanical systems as applied to telephone receivers and similar structures (англ.) // Journal of the American Institute of Electrical Engineers : журнал. — 1921. — Vol. 40. — P. 791—802.
Ссылки
- Монолитные кварцевые полосовые электромеханические фильтры производства ОАО «Завод «Метеор» (недоступная ссылка). ОАО «Завод «Метеор». Дата обращения: 10 октября 2012. Архивировано 19 января 2013 года.
- Электромеханические фильтры. ОАО «Омский научно-исследовательский институт приборостроения». Дата обращения: 10 октября 2012.