Автомат перекоса
Автомат перекоса — механизм для управления несущим винтом вертолётов и некоторых конвертопланов[1]. Автомат перекоса обеспечивает управление горизонтальным и вертикальным перемещением вертолёта, а также его наклоном по крену и тангажу; для этого автомат периодически изменяет угол установки каждой лопасти винта в зависимости от того, где лопасть оказывается в определённый момент времени в ходе вращения винта как целого.


Принцип работы
Каждая из лопастей несущего винта, по сути, представляет собой небольшое крыло, создающее подъёмную силу за счёт набегающего потока воздуха. При этом действующая на лопасть подъёмная сила зависит от ряда факторов, в том числе от скорости движения лопасти относительно воздуха, а также её установочного угла, то есть угла между хордой лопасти и плоскостью вращения винта. Чем больше этот угол, тем большую подъёмную силу обеспечивает лопасть несущего винта.
В большинстве конструкций обороты несущего винта стараются поддерживать постоянными. В этом случае единственной переменной величиной остаётся установочный угол лопастей. При его одновременном увеличении для всех лопастей (то есть увеличении общего шага винта) суммарно развиваемая ими подъёмная сила увеличивается, а при уменьшении — соответственно уменьшается, что обеспечивает управление движением по вертикали: когда тяга несущего винта превышает действующую на летательный аппарат силу тяжести, он увлекается вверх, и наоборот.
Наклон вертолёта вперёд или назад (по тангажу) и вбок (по крену) достигается созданием разницы подъёмных сил, развиваемых лопастями несущего винта при его вращении, в зависимости от того, где находится лопасть в каждый момент времени.
Так, например, для наклона вертолета вперёд, из-за гироскопической прецессии, лопасти несущего винта не меняют установочный угол, проходя над задней частью вертолёта, и над передней, напротив, максимальный и минимальный углы задаются тарелкой перекоса слева и справа или наоборот справа и слева, в зависимости от направления вращения винта, что приводит к соответствующему изменению их подъёмных сил. Их разность создаёт момент, заставляющий вертолёт наклониться вперёд.
Подъёмная сила несущего винта приложена к его втулке и только при неподвижном висении может быть рассмотрена как перпендикулярная к его плоскости. Для наклона вертолёта в какую-либо сторону ротор создаёт момент, за счет изменения шага лопастей на разных участках их движения.
Для понимания того, "выравнивает" ли сила тяжести вертолет, надо понять, относительно какой точки приложены моменты сил, и то, что вертолет свободно висит в воздухе, не имея неподвижной оси для вращения, наклона и т.п.
В вертолетостроении применяются две конструктивных схемы автомата перекоса: Юрьева и Сикорского. Несмотря на кажущееся отличие по внешнему виду и кинематической схеме, принцип действия обеих конструктивных схем одинаков. Циклический шаг каждой лопасти зависит от наклона тарелки автомата перекоса, а общий шаг винта регулируется перемещением тарелки автомата перекоса вдоль оси вращения. Автомат перекоса Сикорского нелегко отличить без сравнительного изображения от автомата перекоса Юрьева по внешнему виду: конструкция Сикорского содержит небольшие дополнительные серволопасти, а у юрьевского автомата перекоса их нет.
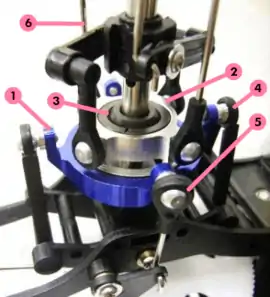
Угол установки каждой лопасти управляется через тягу. Эти тяги идут от плоскости вращения лопастей вниз, где крепятся к вращающемуся кольцу автомата перекоса (внутренняя тарелка), который вращается вместе с лопастями, но в плоскости, управляемой невращающимся кольцом. При отклонении плоскости этих колец относительно плоскости вращения винта вертолёта, угол установки каждой лопасти, в процессе своего кругового движения, меняется тягами, подсоединёнными к внутреннему кольцу. Кольца могут быть скреплены между собой осевым подшипником, внутреннее кольцо закреплено на оси ротора с помощью сферического подшипника. Внешнее кольцо заблокировано от прокручивания и установлено в рамки для управления продольным и боковым отклонением плоскости тарелки.
Общий шаг несущего винта обычно регулируется через перемещение внутреннего кольца[2] вдоль вала. Таким образом, тяги смещают шарниры крепления с лопастями и меняют угол установки каждой лопасти на одинаковое[3] значение.
История
Автомат перекоса изобрёл[4] русский учёный Б. Н. Юрьев в 1911 г., проложив тем самым дорогу для развития вертолётов, так как первые модели без автомата перекоса были способны только к существенно неустойчивому полёту. В свою очередь Сикорский, после своей эмиграции, сделал возможным промышленное применение автомата перекоса, что не смог сделать Юрьев.[5].
Примечания
- (конвертоплан Bell V-22 Osprey)
- Например, вместе с автоматом перекоса
- В первом приближении
- Данное устройство не было им запатентовано
- J. Gordon Leishman. The Hoppers // Principles of Helicopter Aerodynamics. — New York: Cambridge University Press, 2002. — P. 13. — 536 p.