Обобщённые координаты
Обобщённые координаты — переменные состояния системы (не путать с её параметрами), описывающие конфигурацию динамической системы относительно некоторой эталонной конфигурации в аналитической механике, а конкретно исследовании динамики твёрдых тел в системе многих тел. Эти переменные должны однозначно определять конфигурацию системы относительно эталонной конфигурации.[1] Обобщённые скорости — производные по времени обобщённых координат системы.
Пример обобщённой координаты — угол, который определяет местоположение точки, движущейся по окружности. Прилагательное «обобщённая» используется, чтобы отличать эти переменные от традиционного использования термина координат для обозначения декартовых координат: например, описывая расположение точки на окружности через координаты X и Y.
Хотя может существовать много вариантов выбора обобщённых координат физической системы, обычно выбираются переменные, которые удобны для уточнения конфигурации системы и которые упрощают решение уравнения движения. Если эти переменные не зависят друг от друга (независимые переменные), то число независимых обобщённых координат определяется числом степеней свободы системы.[2][3]
Связи и степени свободы
Обобщённые координаты обычно выбираются, чтобы обеспечить минимальное число независимых координат, определяющих конфигурацию системы, которая упрощает формулировку уравнений движения Лагранжа. Однако, может случиться, что в полезном наборе обобщённых координат координаты окажутся зависимыми, что означает, что они связаны одним или более уравнениями связи.
Голономные связи
Для системы из N частиц в трёхмерном вещественном координатном пространстве, вектор положения каждой частицы можно записать тройками чисел в декартовых координатах;

Любые векторы можно обозначить как rk, где k = 1, 2, …, N обозначает частицу. Голономная связь — это уравнение ограничения для частицы k[4][nb 1]

которая связывает все 3 пространственные координаты частицы вместе, так что они не являются независимыми. Ограничения могут изменяться со временем, поэтому время t появится явно в уравнения связи. В любой момент времени, когда t является константой, одна координата будет функцией от других координат, например, если xk K и zk заданы, то также задана и yk. Одно уравнение связи считается одной связью. Для C связей будет C уравнений связи. Не обязательно одно уравнение связи соответствует каждой частицы, и если нет ограничений в системе, то не будет никаких уравнений связи.
Пока конфигурация системы определяется числом 3N, но C координат можно устранить, по одной из координат на каждое уравнение связи. Число независимых координат n = 3N − C. (При размерности D исходной конфигурации потребуется - ND координат, и сокращение согласно связям приведёт к n = ND − C). Идеально использовать минимальное число координат, необходимых для определения конфигурации всей системы воспользовавшись уравнениями связей. Эти величины известны как обобщённые координаты в данном контексте обозначаются как qj(t). Удобно собирать их в n-кортеж

которая является точкой в конфигурационном пространстве системы. Они все независимы друг от друга, и каждая является функцией времени. Геометрически они могут быть длинами вдоль прямой линии или длинами дуг вдоль кривых линий, или углами; не обязательно декартовыми координатами или другими стандартными ортогональными координатами. Каждой степени свободы соответствует одна обобщённая координата, так что число обобщённых координат равно числу степеней свободы, n. Степени свободы соответствует одна величина, соответствующая изменению конфигурации системы, например угол маятника, или длина дуги, пройденой бусинкой на проволоке.
Если можно найти из уравнений связи столько независимых переменных сколько есть степеней свободы, то их можно использовать в качестве обобщённых координат[5]. Положение вектора rk частицы k является функцией всех n обобщённых координат и времени,[6][7][8][5]

и обобщённые координаты можно рассматривать как параметры, связанные со связями.
Соответствующие производные по времени от q называются обобщёнными скоростями,

(каждая точка обозначает одну производную по времени). Вектор скорости vk является полной производной rk по времени

и зависит от обобщённых скоростей и координат. Поскольку мы вольны указать начальные значения обобщённых координат и скоростей отдельно, то обобщённые координаты qj и скорости dqj/dt рассматриваются как независимые переменные.
Неголономные связи
Механическая система может включать в себя ограничения на обобщённые координаты и их производные. Ограничения этого типа известны как неголономные. Неголономные связи первого порядка имеют вид

Примером таких связей являются катящееся колесо или режущая кромка ножа, что ограничивает направление вектора скорости. Неголономные связи могут включать производные высоких порядков, таких как обобщённые ускорения.
Физические величины в обобщённых координатах
Кинетическая энергия
Полная кинетическая энергия системы — это энергия движения системы, определяется как[9]

в которой · обозначает скалярное произведение. Кинетическая энергия является функцией только скоростей vk, а не координат rk. Напротив важное наблюдение[уточнить][10]

показывает, что кинетическая энергия является в общем случае функцией обобщённых скоростей, координат и времени, если связи также меняются со временем, так что T = T(q, dq/dt, t).
В случае, если связи не зависят от времени, тогда все частные производные по времени равны нулю, а кинетическая энергия не имеет зависимости от времени и является однородной функцией степени 2 обобщённых скоростей;

это выражение эквивалентно квадрату элемента длины траектории для частицы k,

делённому на квадрат дифференциала времени, dt2, что даёт квадрат скорости частицы k. Таким образом, для времененезависимых связей достаточно знать элемент длины, чтобы быстро получить кинетическую энергию частицы и, следовательно, Лагранжиан.[11]
Часто используемые элементы длины в 2-мерных полярных координатах (r, θ) —

в 3-мерных цилиндрических координатах (r, θ, Z) —

в 3-мерных сферических координатах (r, θ, φ) —

Обобщённый импульс
Обобщённый импульс «канонически сопряжённый» координате qi определяется

Если Лагранжиан L никак не зависит от некоторой координаты qi, тогда из уравнения Эйлера — Лагранжа получается, что соответствующий обобщённый импульс будет сохраняться, потому что производная этой координаты по времени равна нулю, поэтому импульс должен быть константой движения:

Примеры
Простой маятник
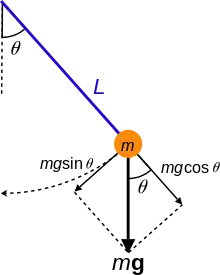
Использование связи обобщённых и декартовых координат для описания движения механической системы можно проиллюстрировать на примере ограниченного движения математического маятника[12][13].
Простой маятник состоит из массы M подвешенной к точке поворота так, что она вынуждена двигаться по окружности радиуса L. Положение массы определяется координатами вектора r=(x, y), измеренными в плоскости окружности, где y соответствует вертикальному направлению. Координаты x и y связаны уравнением окружности

что ограничивает движение M. Это уравнение также содержит связь для компонент скорости,

Теперь введём параметр θ, который определяет угловое положение M как отклонение от вертикального направления. Координаты x и y, определяются как

Применение θ для определения конфигурации этой системы позволяет избежать ограничений, заложенных в уравнение окружности.
Сила тяжести, действующая на тело массы M, задана в декартовых координатах,

где g — ускорение силы тяжести.
Виртуальная работа силы тяжести действующей на тело массы M, во время его движения по траектории r даётся

Вариации δr вычисляется в терминах координат x и y, или в терминах параметра θ,

Таким образом, виртуальная работа задаётся

коэффициент δy — y-проекция приложенной силы. Аналогичным образом, коэффициент δθ известен как обобщённая сила вдоль обобщённой координаты θ, задаётся

Для полноты анализа рассмотрим кинетическую энергию T массы, используя скорость,

тогда,

Уравнения Лагранжа для маятника в терминах координат x и y заданы,

Отсюда получаем три уравнения

с тремя неизвестными, x, y и λ.
С помощью параметра θ, уравнения Лагранжа принимают вид

который записываются в виде,

или

Эта формулировка даёт только одно уравнение, потому что есть только один параметр и отсутствует уравнение связи.
Это показывает, что параметр θ является обобщённой координатой, которую можно использовать в декартовых координатах x и y, для анализа движения маятника.
Двойной маятник
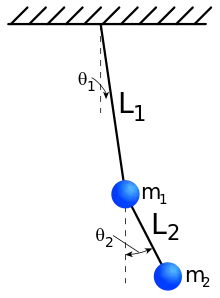
Преимущества обобщённых координат становятся очевидными при анализе двойного маятника. Для двух масс mi, i=1,2, пусть ri=(xi, yi), i=1,2 нужно определить их траектории. Эти векторы удовлетворяют двум уравнениям связи,

Система уравнений Лагранжа двойного маятника состоит из шести уравнений с четырьмя декартовыми координатами xi, yi, i=1,2 и двух множителей Лагранжа λi, i=1,2, которые возникают из двух уравнений связи.
Теперь введём обобщённые координаты θi, i=1,2, определяющие угловое отклонение каждой массы двойного маятника от вертикального направления. В этом случае мы имеем

Сила тяжести, действующая на массы определяется по следующей формуле:

где g — ускорение силы тяжести. Следовательно, виртуальная работа силы тяжести на две массы, во время их движения вдоль траектории ri, i=1,2 даётся

Вариации δri, i=1,2 задаются

Таким образом, виртуальная работа задаётся

и обобщённые силы

Для вычисления кинетической энергии системы

Уравнения Лагранжа в неизвестных обобщённых координатах θi, i=1,2, даются[14]

и

Использование обобщённых координат θi, i=1,2 представляет собой альтернативу формулировке динамики двойного маятника в декартовых координатах.
Обобщённые координаты и виртуальная работа
Принцип виртуальных перемещений гласит, что если система находится в статическом равновесии, виртуальная работа приложенных сил равна нулю для всех виртуальных перемещений системы из этого состояния, а именно, δW=0 для любой вариации δr.[15] При формулировке в терминах обобщённых координат, это эквивалентно требованию, что обобщённые силы для любого виртуального перемещения равны нулю, то есть Fi=0.
Пусть силы действующие на систему Fj, j=1, …, m приложены к точкам с декартовыми координатами rj, то j=1,…, m, тогда виртуальная работа, для виртуальнух перемещений из положения равновесия задаётся

где δrj, j=1, …, m обозначает виртуальные перемещения для каждой точки тела.
Теперь предположим, что каждое δrj зависит от обобщённых координат qi, i=1, …, n, тогда

и

n условий

— обобщённые силы, действующие на систему. Кэйн[16] показывает, что эти обобщённые силы можно переписать в терминах производных по времени,

где vj — скорость точки приложения силы Fj.
Для того, для виртуальная работа обращалась в ноль для произвольного виртуального перемещения, каждая из обобщённых сил должна быть равна нулю, то есть

См. также
Комментарии
- Некоторые авторы приравнивают правую часть уравнения нулю для удобства.
Примечания
- Ginsberg, 2008, p. 397, § 7.2.1 Selection of generalized coordinates
- Farid M. L. Amirouche. §2.4: Generalized coordinates // Fundamentals of multibody dynamics: theory and applications (англ.). — Springer, 2006. — P. 46. — ISBN 0-8176-4236-6.
- Florian Scheck. §5.1 Manifolds of generalized coordinates // Mechanics: From Newton's Laws to Deterministic Chaos (англ.). — 5th. — Springer, 2010. — P. 286. — ISBN 3-642-05369-6.
- Goldstein 1980, p. 12
- Kibble & Berkshire 2004, p. 232
- Torby 1984, p. 260
- Goldstein 1980, p. 13
- Hand & Finch 2008, p. 15
- Torby 1984, p. 269
- Goldstein 1980, p. 25
- Landau & Lifshitz 1976, p. 8
- Greenwood, Donald T. (1987).
- Richard Fitzpatrick, Newtonian Dynamics, http://farside.ph.utexas.edu/teaching/336k/Newton/Newtonhtml.html.
- Eric W. Weisstein, Double Pendulum, scienceworld.wolfram.com. 2007
- Torby, Bruce (1984).
- T. R. Kane and D. A. Levinson, Dynamics: theory and applications, McGraw-Hill, New York, 1985
Литература
- В. И. Арнольд. Математические методы классической механики. — 3-е изд. — М.: Наука, 1989. — 472 с.
- Ginsberg, Jerry H. Engineering dynamics (неопр.). — 3rd. — Cambridge UK: Cambridge University Press, 2008. — ISBN 978-0-521-88303-0.
- Kibble, T.W.B; Berkshire, F.H. Classical Mechanics (неопр.). — 5th. — River Edge NJ: Imperial College Press, 2004. — ISBN 1860944248.