Реостатно-контакторная система управления
Реостатно-контакторная система управления (сокр. РКСУ) — комплекс электромеханического оборудования, предназначенного для регулирования тока в обмотках тяговых электродвигателей (ТЭД) подвижного состава метрополитена, трамвая, троллейбуса и железных дорог, а также в приводах подъемных кранов и прокатных станов.
История
Реостатно-контакторная система управления является долгожителем. Она появилась ещё в конце XIX века когда мощность электродвигателей постоянного тока (сначала на крупных станках, подъемных машинах и судах с электропередачей, а позже — на подвижном составе железных дорог) перевалила за мегаватт, а питающие напряжения перешли отметку в 1 киловольт. Столь мощные двигатели коммутировать непосредственной системой управления стало уже невозможно. В этот же период появился и автоматизированный электропривод постоянного тока, прежде всего в лифтах, где также нашла применение РКСУ.
Первые реализации РКСУ представляли собой по сути увеличенный в размерах контроллер НСУ, вал которого приводился в движение не рукой оператора, а серводвигателем (электрическим, пневматическим). Такие РКСУ называются системами с жесткой однопрограммной коммутацией. Широко применялись практически до конца XX века на трамваях, метровагонах, пассажирских электровозах (например, ЧС1, ЧС2). Параллельно начали развиваться и более сложные системы многопрограммные РКСУ, в которых переключения осуществляются индивидуальными контакторами, управляемые релейным автоматом по командам оператора. Такие системы допускают большую гибкость в управлении тяговым электроприводом и позволяют вводить элементы обратной связи, повышающие степень автоматизации машины (например, реле боксования, элементы автоведения). РКСУ с индивидуальными контакторами может иметь микропроцессорное управление (например, на электровозе 2ЭС6). Часть контакторов могут быть заменены электронными коммутирующими устройствами: диодами и тиристорами в схемах изменения соединения двигателей, низкочастотными транзисторами в схемах вывода реостатов и ослабления возбуждения. Благодаря этим усовершенствованиям РКСУ применяется на подвижном составе уже более века.
Принцип действия


Существуют три метода управления коллекторным электродвигателем — изменение напряжения на якоре, изменение сопротивления цепи якоря, изменение потока возбуждения. Обычно на подвижном составе используются два, иногда три способа.
Переключение соединений
Имея несколько двигателей, можно регулировать напряжение на них, изменяя схему соединения. Если при напряжении в контактной сети 1 киловольт соединить два двигателя последовательно, то на каждый придётся по 500 вольт, если же параллельно, то напряжение удвоится и составит 1 кВ, следовательно, увеличится и скорость транспортного средства. Такой метод экономичен (не используется никаких дополнительных аппаратов, кроме выполняющих переключение контакторов) и поэтому применяется в основном на электровозах, где установлено много мощных двигателей. Например, на электровозе ЧС7, предназначенном для работы на линиях, электрифицированных по системе с напряжением 3 кВ, установлено 8 тяговых двигателей на номинальное напряжение 1,5 кВ каждый. Возможны три схемы их соединения:
- последовательное соединение — все восемь двигателей последовательно, напряжение на каждом составляет вольт;
- последовательно-параллельное (оно же сериесно-параллельное, лат. series — «последовательность») — две параллельных цепи по четыре последовательно соединённых двигателя в каждой, на каждом двигателе вольт;
- параллельное соединение (параллельным называется условно, ибо настоящее параллельное подключение двигателей на напряжение 1,5 кВ к сети на 3 кВ невозможно) — четыре цепи по два последовательно соединённых двигателя, на каждом двигателе вольт.



Переключение соединений необходимо переводить без отключения двигателей от контактной сети, поскольку если двигатели сначала отключить, затем изменить их схему соединения, а потом снова включить, то тяга сначала упадет до нуля, а потом резко возрастет, что может привести к разрыву поезда или сильным толчкам. Поэтому применяют последовательное переключение двигателей. Сначала в цепь ТЭД, соединенных сериесно на ходовой позиции, вновь включают реостаты (размыкаются контакторы КР1 и КР2). Тяга снижается, но не падает до нуля. Затем группу двигателей М1 и М2 контактором параллельного соединения КП1 подключают в обход группы двигателей М3 и М4 сразу же на второй проводник (рельсы), но контактор сериесного соединения КС ещё не отключен. При этом двигатели М3 и М4 оказываются закороченными на реостат R2 и начинают переходить в генераторный режим. Тяга двигателей М1 и М2 возрастает, а М3 и М4 начинают несколько тормозить движение, но так как переход в генераторный режим требует определённого времени — влияние этого эффекта невелико. Затем контактор КС выключается, а КП2 включается и группа двигателей М3 и М4 получает питание от контактной сети. Переход завершен. Производится вывод реостатов и переход на ходовую позицию при параллельном соединении.
Если параллельно контактору КС включить мощный диод, то закорачивать тяговые двигатели не потребуется. Тогда при переходе сначала будет разомкнут контактор КС, но ток будет продолжать течь через диод. Затем можно одновременно замыкать контакторы КП1 и КП2. Обе группы двигателей сразу же перейдут на параллельное соединение, а диод, включенный обратной полярностью — закроется. Такой способ называется вентильным переходом и позволяет переключать соединения двигателей без падения силы тяги. Вентильный переход применяется на поздних советских электровозах с РКСУ ВЛ11 и ВЛ15, а электропоездах и метровагонах 1980-х — начала 1990-х годов выпуска.
В странах СНГ на трамваях переключение двигателей с 1960-х годов не применяется, поскольку переключение схемы соединения на столь легкой рельсовой машине как трамвай вызывает ощутимые толчки. Кроме того трамваи, начиная с 1960-х годов перестали работать с прицепными вагонами (применяется система многих единиц) и столь широкий диапазон изменения тяги и скорости вращения двигателей стал не нужен. К переключению цепей двигателей в трамваях вернулись с приходом контакторно-транзисторной системы управления (РКСУ+ или КТСУ), в трамвае 71-619КТ с КТСУ от фирмы «Канопус» используются две схемы подключения двигателей: параллельно-последовательная и параллельная, значительных толчков при переключении схем удалось избежать благодаря микропроцессорному управлению и независимому управлению возбуждением двигателей. Два варианта соединения двигателей применены на вагонах метрополитена Е и 81-717/714 — имеются две группы по два последовательно соединённых двигателя в каждой, в позиции ПС переключателя положений группы соединяются последовательно (номинальное напряжение на токоприёмнике 750 В, на группе 375 В, на двигателе 187,5 В), в позиции ПП параллельно (750 В на группу, 375 В на двигатель). На электровозе ВЛ10К Челябинского завода (ЧЭРЗ), работающем в три секции, а также на ВЛ15 возможны четыре соединения:
- сериесное маневровое на ВЛ15 — 12 двигателей в цепи ( вольт на двигатель);
- сериесное С на ВЛ15 и на ВЛ10К — 8 двигателей в цепи ( вольт на двигатель);
- СП на ВЛ15 и на ВЛ10К — 4 двигателя в цепи ( вольт на двигатель);
- параллельное на ВЛ15 и на ВЛ10К — 2 двигателя (одна пара) в цепи ( вольт на двигатель).


Ввод реостата
Второй метод регулирования — изменение сопротивления якорной цепи — осуществляется вводом в цепь якоря балластных сопротивлений, объединённых в пусковой или, в случае, если на транспортном средстве имеется электрическое торможение, пуско-тормозной реостат. Реостат может быть выполнен как отдельными резисторами, которые переключаются с помощью контакторов, так и единым аппаратом. Такой аппарат установлен на трамвае ČKD Tatra T3, состоит из 99 расположенных по кругу медных контактов (пальцев) с припаянными к ним М-образными резисторами и скользящего по контактам медного ролика, приводимого в движение электродвигателем.
Ввиду того, что при реостатном пуске энергия рассеивается на реостате согласно формуле , где — ток двигателя, — сопротивление реостата, — рассеиваемая мощность, этот вид пуска считается неэкономичным. Кроме того, нагрев резисторов может привести к их перегоранию. Поэтому длительная езда транспортного средства на реостатных позициях реостатного контроллера не допускается, а часто предусмотрен ещё и активный обдув сопротивлений — например, специальным вентилятором обдуваются ускоритель трамвая Tatra T3, реостаты электровозов ЧС7 и ВЛ82, а на троллейбусах ЗиУ-9 и БТЗ-5276-04 охладивший реостаты воздух в зимнее время направляется заслонкой в салон для отопления, в летнее выбрасывается за борт. На многих электровозах вентилятор, обдувающий реостаты, подключён к отпайке реостата, таким образом автоматически меняется интенсивность обдува в зависимости от тока через реостат.




Регулирование возбуждения
Третий метод регулирования — ослабление потока возбуждения двигателя. Число оборотов двигателя постоянного тока равно , поэтому при уменьшении число оборотов растёт. Так как на электротранспорте возбуждение двигателей чаще всего последовательное, то для ослабления потока параллельно обмотке возбуждения подключаются резисторы или иные шунтирующие устройства — часть тока проходит по ним в обход обмотки возбуждения, снижается, противоЭДС якоря падает, якорный ток и частота вращения растут. Из-за ухудшения коммутации (повышения искрения) на коллекторе при работе на ослабленном возбуждении, особенно на переходных режимах, этот способ регулирования используется только тогда, когда диапазон других методов регулирования уже закончился — реостат выведен, а для перехода на следующее соединение слишком мала скорость либо соединение последнее. Процент тока, проходящего по обмотке возбуждения, называется коэффициентом возбуждения: если 36 % тока проходит по обмотке, а 64 % по шунтам, то это называется ослаблением возбуждения до 36 %.


На электровагонах метрополитена типа Е, электропоездах ЭР2, электровозах ослабление возбуждения (ОВ; старый термин — ослабление поля, ОП) используется на всех соединениях. На электровагонах 81-717/714 ослабление используется лишь на параллельном соединении, аналогично на электропоездах переменного тока ЭР9 — только на согласном включении обмоток трансформатора. В свою очередь, на электровозах ВЛ10 и некоторых других на параллельном соединении, когда коммутация и так неудовлетворительная из-за предельного напряжения на коллекторах (1,5 кВ и выше), из-за упомянутого ухудшения коммутации разрешено использование лишь двух ступеней ОВ из четырёх. На трамвайных вагонах, например, Tatra T3, КТМ-5 и 71-608, электропоездах ЭР2Т, ЭД4, на которых соединение ТЭД постоянное последовательное, и имеющих лишь один тяговый двигатель троллейбусах ослабление возбуждения вообще является единственным методом экономичного регулирования скорости.
На электровозах, имеющих независимое или смешанное возбуждение ТЭД (например, 2ЭС6), используется также режим усиленного возбуждения (когда ток возбуждения больше тока якоря), на котором за счёт повышенного двигатель не имеет склонности к разгону — этим почти исключается боксование. Кроме того, при разгоне в режиме усиленного возбуждения быстрее растёт противоЭДС двигателей и быстрее спадает ток, что позволяет вывести реостат на меньшей скорости, сэкономив электроэнергию. Также при бросках якорного тока в момент включения контакторов система управления скачкообразно подаёт дополнительное возбуждение, снижая якорный ток и тем самым нивелируя скачок силы тяги в момент набора очередной позиции.
Выбор направления движения
Для выбора направления движения согласно правилу левой руки нужно изменить направление тока либо в обмотках возбуждения, либо в якоре. Для этого устанавливается либо специальный групповой переключатель (реверсор), либо (в редких случаях, например, на трамваях Tatra T3) — раздельные контакторы. Реверсор не предназначен для переключения под нагрузкой, так как реверсирование двигателей при движении вызовет тяжёлый режим контртока и выход ТЭД из строя, и поэтому не имеет дугогасительных устройств, а также имеет блокировочные контакты, разрешающие сбор силовой схемы только после разворота реверсора в заданное положение. На электровозах ЧС1, ЧС3 и ранних сериях ЧС2 (серия 34Е) реверсоры также использовались для отключения неисправных двигателей — реверсор неисправных двигателей вручную выводился в среднее положение, при котором подвижные и неподвижные контакты не замкнуты. На ЧС4, ЧС4Т и ЧС8 точно так же выводятся в среднее положение переключатели «Ход-Тормоз» (на ЧС4 — отключатели двигателей), по конструкции аналогичные реверсорам.
Варианты исполнения

РКСУ имеет несколько подвидов, которые имеют между собой ряд принципиальных или конструктивных отличий. Переключения могут выполняться как силовым групповым контроллером (ГрК), конструкция которого (развёртка кулачкового вала) жёстко задаёт программу коммутации силовой цепи, так и отдельными (индивидуальными) контакторами, имеющими раздельные приводы. На электропоездах и городском электротранспорте обычно применяются ГрК, хотя бывают и исключения — например, на трамвае Tatra T3 ослабление возбуждения включается индивидуальными контакторами. На электровозах встречаются различные схемы — с одним групповым контроллером (ЧС1 и ЧС3), с двумя контроллерами (одним для перегруппировок и вывода реостата, другим для включения ослабления возбуждения, ЧС2), контроллером для перегруппировок и контакторами для коммутации реостата и сопротивлений ОВ (ЧС2Т, ВЛ10, ВЛ82М и другие), только с контакторами (ЧС7).
Также различают автоматическую или неавтоматическую РКСУ. В неавтоматическом случае моменты коммутации контакторами силовой цепи ТЭД определяются водителем подвижного состава, например, на электровозах или троллейбусе МТБ-82. Автоматическая РКСУ в своей конструкции имеет реле ускорения или иной похожий аппарат, который самостоятельно управляет процессом коммутации, управляя вращением вала главного контроллера, а водитель только определяет, что требуется от транспортного средства — разгон, торможение или движение с постоянной скоростью. Таким образом, в случае автоматической РКСУ он непосредственно воздействует на схему управления серводвигателем и не имеет прямого доступа к управлению высоковольтным коммутационным процессом. Большинство типов отечественного подвижного состава электротранспорта выпускается именно с автоматической РКСУ. В их число входят трамвайные вагоны типов 71-605, 71-608К и 71-608КМ, 71-619К, троллейбусы ЗиУ-682 и БТЗ-5276-04, электропоезда, а также современные электровозы с микропроцессорным управлением РКСУ, например ЭС4К.
Преимущества и недостатки
Реостатно-контакторная система управления применяется на протяжении более ста лет и за столь долгий период сосуществовала со всеми другими системами управления тяговыми двигателями постоянного тока. Поэтому рассматривать её преимущества и недостатки следует в сравнении с каждой из конкурирующих систем. Под РКСУ понимается её классический вариант без дополнительных регулирующих устройств, работающих на ином принципе (например, независимое управление током обмоток возбуждения от статических полупроводниковых преобразователей), а также без микропроцессорного управления (как, например, на электровозе ЧС2, электропоезде ЭР2 или трамвае КТМ-5М3). Под РКСУ+ понимается система, содержащая все указанные усовершенствования (как, например, на электровозе 2ЭС6 или трамвае КТМ-19КТ с контакторно-транзисторной системой управления).
| Особенность | НСУ | РКСУ | РКСУ+ | ТИСУ | ТрСУ и асинхронный привод |
|---|---|---|---|---|---|
| Сложность силовых цепей | Низкая | Очень высокая | Достаточно высокая | Очень высокая | Сравнительно невысокая, особенно для асинхронного привода |
| Сложность цепей управления | Отсутствуют | Очень высокая | Сравнительно невысокая | Высокая | Невысокая. На подвижном составе с мультиплексной шиной цепи управления отсутствуют полностью |
| Материалоемкость | Средняя | Очень высокая | Достаточно высокая | Достаточно высокая | Низкая |
| Потери энергии | Высокие | Высокие | Средние | Сравнительно низкие | Практически отсутствуют |
| Возможность работы по СМЕ | Нет | Да | Да | Да | Да |
| Дискретность регулирования тяги | Высокая | Высокая | Сравнительно низкая | Низкая | Отсутствует |
| Возможность уменьшения тяги без отключения ТЭД | Отсутствует | Возможно, но только рекуперативным торможением | Возможно | Возможно | Возможно |
| Возможность поосного регулирования тяги | Нет | Возможно, но очень сложно | Возможно, но в ограниченном диапазоне | Возможно | Возможно |
| Реостатное торможение | Только при высокой скорости | Возможно | Возможно | Возможно | Возможно практически до полной остановки |
| Рекуперативное торможение | Практически невозможно | Возможно, но только на достаточно высокой скорости | Возможно в даже на невысоких скоростях | Возможно в даже на невысоких скоростях | Возможно практически до полной остановки |
| Ремонтопригодность в условиях депо | Очень высокая | Высокая | Силовые цепи ремонтопригодны, вспомогательные цепи и блоки управления — только замена | Возможно, но требует специально оснащенных лабораторий | Практически невозможно, только замена блоков |
| Частота и сложность технического обслуживания | Высокая | Очень высокая | Высокая | Невысокая | Как правило, необслуживаемые |
| Блочно-модульное построение | Нет | Возможно | Как правило, блочно-модульные | Возможно | Как правило, блочно-модульные |
| Возможности самодиагностики | Нет | Очень ограничены: отдельные сигнальные лампы и реле-защелки | При микропроцессорном управлении — очень высокие | При микропроцессорном управлении — очень высокие | Практически полная непрерывная самодиагностика |
| Устойчивость к перегрузкам и коротким замыканиям | Высокая | Очень высокая | Высокая | Невысокая | Очень высокая, так как имеется система самозащиты транзисторов |
Пример работы РКСУ
В качестве примера показана работа реостатно-контакторной системы управления тяговыми двигателями трамвайного вагона 71-605. Аналогичная схема применена на вагонах 71-608К, ЛМ-68М, ЛВС-86. Вагон имеет 4 тяговых двигателя, включенных в две группы по 2 двигателя последовательно в каждой. Двигатели имеют основные сериесные (последовательные) обмотки возбуждения и дополнительные независимые обмотки подмагничивания.
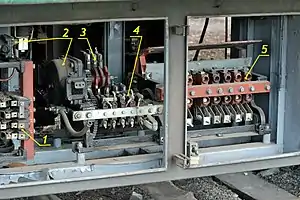
В состав РКСУ входят:
- Линейный контактор ЛК1, обеспечивающий подключение тяговых двигателей (ТЭД) к контактной сети (КС);
- Контактор Ш — обеспечивающий подключение независимых обмоток (НО) ТЭД к КС;
- Резистор РШ, ограничивающий ток через НО ТЭД;
- Контакторы Ш1 и Ш2, ответвляющие часть тока или всего тока, питающего НО в обход РШ для регулирования возбуждения при торможении;
- Пусковые реостаты, вводимые в цепь питания ТЭД при пуске;
- Контактор Р, включающий питание ТЭД в обход пусковых реостатов;
- Групповой реостатный контроллер, включающий в себя контакторы РК1 — РК22, обеспечивающий вывод пусковых и тормозных реостатов и ввод реостатов ослабления возбуждения ТЭД;
- Тормозные реостаты;
- Реостаты ослабления возбуждения Rосл;
- Реле ускорения и торможения РУТ;
- Реле минимального тока РМТ;
- Контакты реле торможения от батареи ТБ;
- Линейный контактор ЛК3.
Пуск на маневровой позиции
При постановке контроллера водителя на маневровую позицию включается линейный контактор ЛК1 и контактор Ш. Вал реостатного контроллера установлен на первую позицию и не вращается. При этом замкнуты контакты РК6. Ток в цепь питания ТЭД поступает через все пусковые реостаты, включенные последовательно. На маневровой позиции производится движение вагона с минимальной скоростью при маневрировании в депо и проезде стрелок. Длительное движение на этой позиции не допускается, так как может привести к перегреву пусковых реостатов.
Пуск на ходовых позициях Х1 и Х2
Основными рабочими ходовыми позициями контроллера водителя являются Х1 и Х2. Собирается та же цепь, что на маневровой позиции. Начинает работать реостатный контроллер. Вращаясь от 1-й позиции, вал реостатного контроллера размыкает и замыкает контакты РК1-РК8 обеспечивая вывод (снижение полного сопротивления) пусковых реостатов. При этом происходит разгон вагона и ток через обмотки ТЭД начинает падать. За счет вывода реостатов удается поддерживать ток, и соответственно интенсивность разгона, на требуемом уровне. Ток через ТЭД контролируется реле ускорения и торможения (РУТ). Если в процессе разгона ток через ТЭД превышает 100А на позиции Х1 и 140А на позиции Х2 реле срабатывает и разрывает цепь питания серводвигателя реостатного контроллера. Вал реостатного контроллера останавливается в одной из промежуточных позиций. Вагон продолжает разгоняться с неизменным сопротивлением реостатов в цепи ТЭД. Как только в процессе разгона ток падает ниже тока уставки РУТ вал реостатного контроллера вновь начинает вращаться. Таким образом обеспечивается автоматическое регулирование тока в цепи ТЭД.
При достижении валом реостатного контроллера 13-й позиции срабатывает контактор Р и ТЭД подключаются к КС напрямую, минуя реостаты. Происходит выход на автоматическую характеристику. Вал реостатного контроллера поворачивается до 14-й позиции и останавливается. При этом, если рукоятка контроллера водителя установлена в положение Х2, размыкается контактор Ш и независимые обмотки ТЭД отключаются, что обеспечивает меньший уровень возбуждения, и большую скорость вагона по сравнению с позицией Х1.
Пуск на ходовой позиции Х3
Процесс пуска до 14-й позиции реостатного контроллера аналогичен работе на позициях Х1 и Х2, с той лишь разницей, что на позиции контроллера водителя Х3 разгон происходит при токе 180 А. При достижении 14-й позиции вал реостатного контроллера не останавливается, а продолжает движение (под контролем РУТ) до 17-й позиции. На позициях с 15-й по 17-ю ток, протекающий через сериесные обмотки возбуждения уменьшается, за счет его ответвления в реостаты ослабления возбуждения Rосл. При этом достигается ещё большая скорость по сравнению с позицией Х2.
Выбег вагона
При постановке ручки контроллера водителя в положение 0 в процессе движения вагона, размыкаются контакторы ЛК1 и Ш — ТЭД отключаются от контактной сети. Происходит движение вагона по инерции. В это время вал реостатного контроллера возвращается на первую позицию. Причем вращение происходит в том же направлении, что и при пуске. После возвращения вала реостатного контроллера на первую позицию система готова к повторному пуску или служебному торможению.
Электродинамическое торможение на позициях Т1, Т2, Т3
Позиции Т1, Т2, Т3 контроллера водителя предназначены для регулирования скорости вагона при движении под уклон и служебного снижения скорости до 15 км/ч.
Линейный контактор ЛК1 (если он был включен), размыкается, а тормозные контакторы Т1 и Т2 — замыкаются. Контактор Ш также замыкается. При этом ТЭД начинают работать в режиме генераторов, нагруженных на тормозные реостаты, гася скорость вагона. Возбуждение ТЭД осуществляется от независимых обмоток. Ток через эти обмотки регулируется сопротивлением РШ, которое на позиции Т1 введено полностью, что обеспечивает минимальный ток возбуждения и минимальное замедление. На позиции Т2 часть этого сопротивления замыкается контактором Ш1, а на позиции Т3 — все сопротивление замыкается контактором Ш2. Таким образом регулируется замедление вагона. Ток возбуждения через часть тормозного реостата проходит и по сериесным обмоткам ТЭД.
Поскольку при торможении ток возбуждения проходит через тормозной реостат вместе с током торможения, ток возбуждения оказывается связан (компаундирован) с током торможения. При малом значении тока торможения падение напряжение на тормозном реостате минимальное — ток возбуждения растет. При увеличении тока торможения падение напряжения на тормозном реостате увеличивается, а поскольку он включен в цепь возбуждения последовательно с обмотками, напряжение, приложенное к последним, падает. Следовательно ток возбуждения также падает, снижая интенсивность торможения. Таким образом обеспечивается автоматическая стабилизация тормозного усилия.
Электродинамическое торможение на позиции Т4
На позиции контроллера водителя Т4 происходит служебное торможение до остановки вагона. Собирается та же цепь, что и при торможении на позиции Т3, но дополнительно в работу вступает реостатный контроллер, который РК9-РК12 одной группы двигателей и РК13-РК16 — другой — уменьшает сопротивление тормозных реостатов, включенных в цепь ТЭД. Этот процесс происходит также под контролем реле ускорения и торможения. Снижение сопротивления тормозных реостатов необходимо потому, что по мере торможения вагона ЭДС в обмотках ТЭД снижается, и для поддержания постоянным значения тока торможения необходимо уменьшение сопротивления нагрузки. При увеличении тока торможения свыше 120А возможен юз колес, и для его предотвращения РМТ отключает серводвигатель реостатного контроллера до тех пор, пока ток не снизится ниже уставки РМТ. Таким образом, РМТ и реостатный контроллер выполняют функцию антиблокировочной системы. Остановка реостатного контроллера происходит на 8-й позиции.
При скорости 4-5 км/ч эффективность электродинамического торможения падает. При этом снижается ток в обмотках ТЭД, и реле минимального тока РМТ включает цепи приводов механических тормозов. Вагон останавливается. Контактор Ш отключается, и ТЭД оказываются полностью обесточенными.
Экстренное торможение на позиции ТР
На позиции контроллера водителя ТР или при отпускании педали безопасности происходит экстренное торможение вагона. Собирается та же цепь, что и на позиции Т4. Однако уставка реле ускорения и торможения увеличивается до 180 А, так как для предотвращения проскальзывания при экстренном торможении включаются песочницы, подающие под колеса вагона песок из бункеров. Одновременно включаются рельсовые тормоза. Если реостатный контроллер не успел вернуться на первую позицию, то замыкаются контакторы экстренного торможения КЭ1 и КЭ2, полностью выводящие тормозные реостаты для обеспечения максимальной эффективности торможения.
Электродинамическое торможение с возбуждением от батареи
Если в процессе торможения вагона пропадает напряжение в контактной сети или срабатывает защита, происходит автоматическое переключение сериесных обмоток возбуждения на питание от батареи. При этом замыкаются контакты реле ТБ и размыкается линейный контактор ЛК3. В остальном процесс аналогичен штатным режимам торможения.
Литература
Раков В. А. Электровозы серий ЧС1 и ЧС3 // Локомотивы отечественных железных дорог 1956 - 1975. — М.: Транспорт, 1999. — С. 47—53. — ISBN 5-277-02012-8.
- Руководство по эксплуатации трамвайного вагона 71-605.
Ссылки
- Паровозные технологии XXI века — статья об устройстве и проблемах применения СУ ТЭД на городском электротранспорте.