Переходный процесс
Перехо́дный проце́сс — в теории систем представляет изменения во времени координат динамической системы, до некоторого установившегося состояния; возникает под влиянием возмущающих воздействий, изменяющих её состояние, структуру или параметры, а также вследствие ненулевых начальных условий[B: 1].
Характеристики
Изучение переходных процессов — важный шаг в процессе анализа динамических свойств и качества рассматриваемой системы. Широкое применение нашло экспериментальное и аналитическое определение и построение переходных процессов для наиболее неблагоприятных условий работы динамической системы при внешних возмущениях типа дельта-функции, ступенчатом или синусоидальных воздействиях[B: 1][B: 2].
Оценка качества САУ по виду кривой переходного процесса производится при помощи так называемых прямых показателей качества — перерегулирования, допустимого числа колебаний и времени переходного процесса. Обычно рассматривают переходный процесс, возникающий в системе при воздействии единичной ступенчатой функции, т. е. переходная функция замкнутой системы[1].
Время переходного процесса
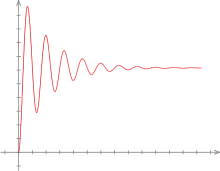
Длительность переходного процесса в системе характеризует её быстродействие, а его характер определяет качество системы. За количественную характеристику длительности переходного процесса принимают время, необходимое выходному сигналу системы для того, чтобы приблизиться к своему установившемуся значению, т. е. время, по истечении которого выполняется равенство:

- где — установившееся значение;
- — наперёд заданное положительное число[1].


В линейных непрерывных динамических системах принято рассматривать переходной процесс, вызванный единичным ступенчатым возмущением, но в этом случае установившееся значение достигается за бесконечно большое время. Если же ограничить точность достижения установившегося значения некоторой малой величиной , то тогда длительность переходного процесса будет конечной величиной[B: 1].

В приложениях теории управления обычно в САУ принимают равной 0,01—0,05 от , т. е. переходный процесс считают закончившимся, когда переходная функция отличается не более, чем на 1–5 % от своего установившегося (стационарного) значения[1].
Перерегулирование
Перерегулирование (определяется величиной первого выброса) — отношение разности максимального значения переходной характеристики и её установившегося значения к величине установившегося значения. Измеряется обычно в процентах.
Степень затухания переходного процесса
Степень затухания переходного процесса определяется относительным уменьшением соседних амплитуд переходной характеристики[B: 3].
Числителем является амплитуда первого колебания. Степень затухания показывает во сколько раз уменьшается амплитуда второго колебания по сравнению с первым.
Степень затухания системы зависит от показателя колебательности (см. ниже).

Логарифмический декремент колебания
Логарифмический декремент колебания — натуральный логарифм отношения амплитуд двух соседних перерегулирований. Обратная ему величина показывает, за какое число колебаний их амплитуда уменьшается в раз ( — основание натуральных логарифмов). Уместен лишь для характеристики линейных систем[B: 4].

Колебательность
Характеризует склонность системы к колебаниям и определяется как модуль отношения амплитуд второго колебания к амплитудам первого колебания. Колебательность системы характеризуют при помощи показателя колебательности , который представляет собой отношение резонансного пика при резонансной частоте к значению АЧХ при нулевой частоте[2].
Показатель колебательности связан со степенью колебательности формулой:

При увеличении , уменьшается показатель колебательности и соответственно происходит уменьшение степени колебательности.

Установившаяся ошибка
Установившаяся ошибка системы — разница между предполагаемым и реальным значением выходного сигнала при времени, стремящемся к бесконечности. В идеальных астатических системах установившаяся ошибка равна нулю.
Примеры
Электрические цепи
В электрической цепи переходный процесс характеризуется плавным инерционным изменением тока и напряжения в цепи в ответ на приложенное внешнее воздействие[B: 5].
Формула, описывающие протекание простейших переходных процессов (разряд конденсатора через резистор):


- где — значение напряжения на конденсаторе в момент перед началом переходного процесса,
- — постоянная времени переходного процесса, С — ёмкость, R — сопротивление элементов цепей.


Для цепей, содержащих индуктивность, если можно пренебречь активным сопротивлением, постоянная времени равна:

См. также
- Бифуркационная память
- Время изодрома
- Зона нечувствительности
- Коэффициент демпфирования
- Переходные процессы в электрических цепях
Примечания
- Пономарёв, 1974, § 5.7. Оценка запаса устойчивости и быстродействия по кривой процесса регулирования, с. 201—202.
- МЭИ, 2011, 2.3. Решение линейных дифференциальных уравнений во временной области, с. 44—48.
Литература
- Книги
- Энциклопедия кибернетики / Глушков В. М.. — Киев: Глав. ред. УСЭ, 1974. — 624 с.
- Основы автоматического регулирования и управления / Пономарев В. М. и Литвинов А. П.. — М.: Высшая школа, 1974. — 439 с.
- Управление и инноватика в теплоэнергетике / Андрюшин А. В., Сабанин В. Р., Смирнов. Н. И.. — М.: МЭИ, 2011. — 392 с. — ISBN 978-5-38300539-2.
- Андронов А. А., Витт А. А., Хайкин С. Э. Теория колебаний. — 2-е изд., перераб. и испр.. — М.: Наука, 1981. — 918 с.
- Веников В. А. Переходные электромеханические процессы в электрических системах. — М.: Высшая школа, 1978. — 415 с.