Перерегулирование
Перерегулирование — в теории управления, электронике и математике ограниченный по времени выброс сигнала или функции над целевым значением. Чаще всего рассматривается в качестве динамической характеристики динамической системы (например фильтра низких частот) при рассмотрении переходной функции. Перерегулирование зачастую сопровождается затухающими колебаниями.
Теория управления
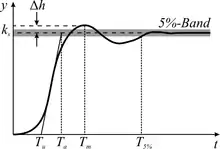
В теории управления перерегулирование относится к тому, насколько пиковое значение сигнала превосходит установившееся значение сигнала.[1] Для переходной функции, процент перерегулирования это разность пикового и установившегося значения, делённая на установившееся. Часто рассматривается также процент перерегулирования (PO) как функция декремента затухания ζ:[2]

Декремент затухания можно найти как:

См. также
- Переходная функция
- Переходной процесс
- Время переходного процесса
Примечания
- Kuo, Benjamin C & Golnaraghi M F. Automatic control systems (неопр.). — Eighth edition. — NY: Wiley, 2003. — С. §7.3 p. 236—237. — ISBN 0-471-13476-7.
- Modern Control Engineering (3rd Edition), Katsuhiko Ogata, page 153.
Литература
- Михайлов В. С. Теория управления. — Киев: Выща школа. Головное издательство, 1988.. — 312 с; 26 табл., 80 ил. — Библиогр.: 35 назв. ISBN 5—11—001791—3
- Бесекерский В. А., Попов, Е. П. Теория систем автоматического регулирования. — СПб.: Профессия, 2004. — 749 с. ISBN 5-93913-035-6.