Схемы вертолётов
Схема вертолёта описывает количество несущих винтов вертолёта, а также тип устройств, используемых для управления вертолётом.
Усилие для раскручивания несущего винта может передаваться от двигательной установки через осевой вал. В этом случае по третьему закону Ньютона возникает реактивный момент, закручивающий корпус вертолёта в противоположную от вращения несущего винта сторону (на земле такому вращению препятствует шасси аппарата).
Существует ряд основных конструктивных схем компенсации реактивного момента и управления вертолёта с использованием как единственного, так и нескольких несущих винтов.
В случаях, когда раскручивание несущего винта осуществляется либо набегающим потоком воздуха (автожиры, вертолёты в режиме полёта на авторотации), либо с помощью реактивных струй, расположенных на концах лопастей (реактивный вертолёт), реактивный момент не возникает, и соответственно, необходимость в его компенсации отсутствует.
Одновинтовые схемы с рулевым устройством
В таких схемах для компенсации реактивного момента используются устройства, создающие тягу, которая закручивает вертолёт в противоположном реактивному моменту направлении. Преимуществом таких схем является их относительная простота, однако при этом происходит отбор мощности силовой установки вертолёта.
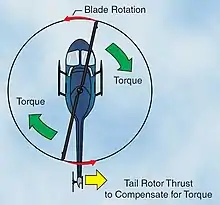
Вертолёты одновинтовой схемы с рулевым винтом

В данной схеме винт небольшого диаметра располагается на хвостовой балке вертолёта на некотором расстоянии от оси несущего винта. Создавая тягу в плоскости, перпендикулярной вертикальной оси вертолёта, рулевой винт компенсирует реактивный момент. Изменяя тягу рулевого винта, можно управлять поворотом вертолёта относительно вертикальной оси. Большинство современных вертолётов выполнено по одновинтовой схеме.[1]
Впервые её запатентовал на своем летательном аппарате Борис Юрьев вместе с автоматом перекоса в 1912 году[2]. Однако первую подобную модель предложил в 1874 году немецкий конструктор Аченбах.[3]
Первый успешный вертолёт VS-300 с рулевым винтом построил Игорь Сикорский, вертолёт поднялся в воздух 13 мая 1940 года. Успех данного вертолёта заключается в том, что на основе этой модели для американской армии серийно выпускался вертолёт R-4.
Неоспоримым преимуществом данной схемы является простота конструкции и системы управления, что приводит к уменьшению затрат на производство, ремонт и обслуживание.
Кроме того, выпускают вертолёты, например Ми-28, с так называемым Х-образным, четырёхлопастным рулевым винтом, лопасти которого имеют различные взаимные углы установки на втулке (наподобие буквы X). Винт такого типа обладает преимуществами перед обычным (с равномерным азимутальным распределением лопастей) по уровню шума и уменьшению неблагоприятного воздействия на лопасти концевых вихревых шнуров, генерируемых соседними лопастями.
Недостатки данной схемы:
- рулевой винт отбирает часть мощности двигателя (до 10 %) и вместе с тем не даёт ни подъёмной силы, ни тяги, направленной вперёд;
- воздушный поток от несущего винта ухудшает характеристики рулевого винта, вследствие этого рулевой винт стараются размещать как можно выше на хвостовой балке;
- рулевой винт является весьма уязвимым при полетах вблизи земли;
- рулевой винт, так же как и несущий, может попадать в опасный режим вихревого кольца, что ограничивает возможности маневрирования;
- узкий диапазон возможных центровок.
Вертолёты с рулевым винтом в кольце, фенестрон

В современном вертолётостроении иногда применяют многолопастный рулевой винт в кольцевом канале киля — фенестрон (от лат. fenestra — окно). Диаметр фенестрона в два с лишним раза меньше, чем диаметр обычного рулевого винта.
Впервые применён на лёгких вертолётах французской фирмы «Аэроспасьяль».
Используется в конструкциях лёгких и средних вертолётов[4]
Такая конструкция имеет несколько существенных преимуществ:
- уменьшается вредное сопротивление вертолёта;
- предотвращаются задевание вращающимися лопастями рулевого винта за наземные предметы при маневрировании на предельно малых высотах, а также травмирование людей при работе вертолёта на земле;
- эффективность выше, чем у открытого рулевого винта при одинаковых диаметрах.
Недостатками являются:
- значительное увеличение толщины и массы киля, делающей установку фенестрона на тяжёлые вертолёты нецелесообразной;
- высокочастотный шум;
- нелинейности в характеристиках путевого манёвра.
Винтокрыл
В этой схеме используются винты, расположенные на крыльях или фермах летательного аппарата — винтокрыла. Причём тяга обоих винтов направлена вперёд, а для компенсации реактивного момента в режиме висения один из винтов обеспечивает бо́льшую тягу, чем другой. В режиме полёта эти винты используются как тянущие, что увеличивает скорость винтокрыла, при этом несущий винт переходит в режим авторотации. Первый аппарат с таким принципом компенсации реактивного момента предложил и запатентовал Б. Н. Юрьев в 1910 году[5]. Примером такой модели в настоящее время может служить Eurocopter X3.
Преимуществом винтокрыла можно считать высокие скорости полёта, недостижимые для классической схемы в силу особенностей аэродинамики. Так, например, винтокрыл «Ротодайн» фирмы «Фейри» в 1959 году достиг скорости в 307,22 км/ч,[6], а Eurocopter X3 в 2010 году — 430 км/ч.
Недостатком такой системы является потеря бóльшей мощности на компенсацию реактивного момента в режиме зависания по сравнению с рулевым винтом.
Однако не все винтокрылы используют данный способ компенсации. Например, винтокрыл Ка-22 использовал для противодействия реактивному моменту пару поперечных винтов, а Ротодайн — реактивное вращение лопастей.
Струйная система управления, NOTAR
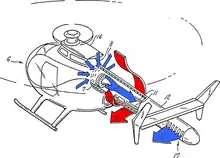
Для компенсации реактивного момента используется система управления пограничным слоем на хвостовой балке, применяющая эффект Коанда, вместе с реактивным соплом на конце балки, или же только реактивное сопло.
Управляющая сила эффекта Коанды возникает по той же причине, по какой возникает подъёмная сила крыла — из-за несимметричного обтекания профиля хвостовой балки нисходящим воздушным потоком, образованным несущим винтом. Вентилятор, расположенный у основания хвостовой балки засасывает воздух из отверстий, расположенных вверху корпуса вертолёта, создавая необходимое повышенное давление внутри хвостовой балки. На правой стороне хвостовой балки с помощью специальных сопел устанавливается более быстрое движение воздушного потока, чем на левой стороне. Тем самым, вследствие закона Бернулли, давление воздуха на левой стороне будет больше, чем на правой, эта разность давлений приводит к появлению силы, направленной слева направо.
Примечание: на схеме синими стрелками показаны потоки воздуха, проходящие через хвостовую балку, красными — по поверхности хвостовой балки.
На Западе известна как NOTAR, англ. No Tail Rotor — «без хвостового винта». В Советском Союзе эксперименты проводились на вертолёте Ка-26-СС. Серийно вертолёты, использующие такую схему, выпускаются компанией «MD Helicopters».
Из-за отсутствия рулевого винта данная система является самой тихой и безопасной.
Одновинтовые схемы с реактивным принципом вращения лопастей
В этих схемах из-за отсутствия трансмиссии, передающий крутящий момент от силовой установки к несущему винту, не требуется компенсация реактивного момента. Преимуществом таких схем является простая конструкция, а общим недостатком можно считать небольшую скорость при значительном расходе топлива. Для управления по рысканью может использоваться рулевой винт, отклоняемые поверхности либо реактивные устройства.
Существуют различные варианты этой схемы:
- с установкой прямоточных воздушно-реактивных двигателей на законцовках лопастей;
- с соплами на законцовках лопастей и подачей горячего выхлопа на них от расположенного в фюзеляже газотурбинного двигателя («привод горячего цикла»), в этом случае лопасти несущего винта изготавливаются из жаропрочных сплавов;
- компрессорный привод «холодного цикла»: газотурбинный двигатель в корпусе вертолёта приводит компрессор, а сжатый воздух от него подводится через трубопроводы к соплам на законцовках лопастей;
- также в ряде экспериментальных вертолётах начала XX века роль реактивных двигателей играли пропеллеры, установленные на концах лопастей, например вертолёт Кёртиса-Блекера[7].
Самый первый реактивный вертолёт спроектировал и построил немецкий конструктор Добльгоф.[8] Экспериментальные реактивные вертолёты строились также в Польше, в США их разработкой по заказу военных довольно долго занималась фирма «Хьюз». Однако большего успеха добилась американская компания «Hiller», которая выпускала вертолёты YH-32 «Хорнет» и HJ-1 «Колибри» малыми сериями для армии, флота и полиции[9]. В 1956 году американец российского происхождения Евгений Глухарев поднял в воздух первый реактивный ранцевый вертолёт MEG-1X[10]. В настоящий момент вертолёты с реактивным приводом серийно не производятся.
Основным преимуществом такой схемы является простая и сравнительно лёгкая конструкция, исключающая сложную трансмиссию.
Главными недостатками такой компоновки считается:
- слишком большой расход топлива;
- шумность;
- сложность изготовления герметичных втулок;
Для варианта с воздушно-реактивными двигателями к тому же:
- сложности с безопасным снижением на авторотации;
- необходимость в дополнительном стартовом устройстве, которое раскручивает несущий винт;
- большая заметность в тёмное время суток из-за ярких огней двигателей.
- огонь, вырывающийся из сопел(«привод горячего цикла») ослепляет пилота, особенно в ночное время.
Схемы с двумя несущими винтами
Реактивные моменты в таких схемах взаимно компенсируются синхронным разнонаправленным вращением двух винтов. Плоскости вращения винтов могут иметь различные степени перекрытия при количестве лопастей меньше четырёх.
Общим преимуществом таких схем является отсутствие потерь мощности на компенсацию реактивного момента, однако такие схемы обладают комплексной сложностью:
- необходимостью жесткой синхронизации несущих винтов, как по частоте вращения, так и в органах управления;
- увеличением массы несущей системы и системы управления;
- повышенным лобовым сопротивлением несущей системы.
Продольная схема

Продольная схема состоит из двух горизонтальных винтов, расположенных друг за другом и вращающихся в разных направлениях. Задний винт приподнят над передним для уменьшения негативного влияния воздушной струи от переднего винта. Данная схема в основном используется в вертолётах большой грузоподъёмности. Вертолёты с продольной схемой иногда называют «летающими вагонами».[11]
Первопроходцем в создании вертолёта по продольной схеме стал французский инженер Поль Корню. В 1907 году его аппарат смог оторваться от земли на 20 секунд. При первом испытании аппарат оторвался от земли сначала на 0,3 м (полная масса 260 кг), затем на 1,5 м (полная масса 328 кг)[12].
В 1930-х годах разработка вертолётов продольной схемы велась в Бельгии русским эмигрантом Николаем Флориным, построившим 3 модели вертолётов, одна из которых («Флорин-2») поставила ряд рекордов продолжительности полёта. Дальнейшим развитием данной конструкции занялся американец Франк Пясецки, выпустив в 1945 году для армии США вертолёт, который из-за своей формы получил название «летающий банан».
В Советском Союзе тоже велись работы в этом направлении. В 1952 году под руководством Игоря Александровича Эрлиха[13] после девяти месяцев с начала проектирования состоялся первый полёт Як-24, превосходившего в то время все зарубежные образцы.[14]
Положительными сторонами этой схемы вертолёта являются:
- большой объём грузового помещения.[15];
- большой допустимый диапазон эксплуатационных центровок. Возможность использовать почти весь объём грузового пространства без потери в управляемости.
К недостаткам продольной схемы вертолёта относятся:
- появление значительных вибраций в некоторых режимах полета. Этот эффект особенно сильно проявлялся на ранних моделях вертолётов;
- некоторое ухудшение коэффициента полезного действия заднего несущего винта. Для решения этой проблемы задний винт расположен выше относительно переднего;
- неполная компенсация реактивных моментов винтов, которая приводит к появлению паразитной боковой силы;
- некоторая несимметричность устойчивости и управляемости в путевом отношении;
- сложная трансмиссия.
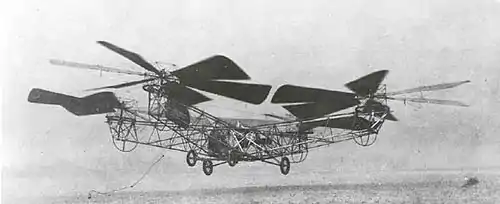
Поперечная схема

Поперечные винты устанавливаются на концах крыльев или специальных опор (ферм) по бокам корпуса вертолёта. К поперечной схеме можно отнести и некоторые конвертопланы в вертолётном режиме, например Bell V-22 Osprey, Bell Eagle Eye.
В 1921 году американский инженер Генри Берлинер вместе с отцом Эмилем Берлинером спроектировал вертолёт поперечной схемы. Он разместил по бокам самолетного фюзеляжа два небольших, четырёхметровых винта, а на хвосте рулевой пропеллер с вертикальной осью вращения — он должен был «задирать» хвост аппарата, чтобы у винтов появлялась горизонтальная составляющая тяги для движения вертолёта вперёд. Для управления вертолётом использовались отклоняемые поверхности, типа элеронов, а также наклоняемые оси несущих винтов.[16]
Первым успешным вертолётом поперечной схемы стал немецкий Focke-Wulf Fw 61, который в 1937 году поставил ряд рекордов по дальности и скорости. В Советском Союзе первым вертолётом поперечной схемы стал проект «Омега» 1941 года.
Достоинства:
- высокий коэффициент полезного действия несущих винтов вследствие отсутствия взаимного влияния воздушных потоков от этих винтов;
- наиболее выгодная схема с точки зрения устойчивости и управляемости вследствие аэродинамической симметрии.
К недостаткам этой схемы следует отнести:
- сложную трансмиссию;
- повышенный вес конструкции;
- повышенное лобовое сопротивление.
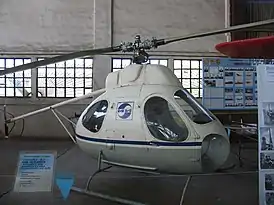
Соосная схема

Соосная схема представляет собой пару винтов, расположенных один над другим на соосных валах, вращающихся в противоположные стороны, благодаря чему компенсируются реактивные моменты, возникающие от каждого из винтов.
Первый патент на соосное расположение несущих винтов летательного аппарата был выдан в 1859 году англичанину Генри Брайту.
Первым полностью управляемым стал вертолёт Лабораторный гироплан, построенный Луи Шарлем Бреге и Рене Дораном в 1936 году.
Первый полёт вертолёта соосной схемы с полностью металлическими лопастями совершил американец Стенли Хиллер в 1944 году; конструкция оказалась настолько удачной, что сам Хиллер часто демонстрировал его устойчивость, отпуская рычаги управления и высовывая руки из окон[17].
В Российской империи два прототипа вертолёта Игоря Сикорского (создателя первого серийного вертолёта Sikorsky R-4, имевшего классическую схему) были выполнены по соосной схеме[18]. В Советском Союзе темой соосных вертолётов впервые занялся коллектив Яковлева в 1944 году, а в 1945 году коллектив энтузиастов под руководством Николая Ильича Камова.
Вертолёт Камова Ка-8 полетел 12 ноября 1947 года[19], а вертолёт Яковлева «Шутка» 20 декабря 1947 года[20]. Для конструкторского бюро Камова соосная схема стала основной. Теперь вертолёты Камова — единственные в мире пилотируемые вертолёты соосной схемы, выпускаемые серийно.
Достоинства соосной схемы:
- малые габариты, так как лопасти соосных винтов короче несущих лопастей вертолётов с рулевым винтом схожего класса: требуется минимальная, по сравнению с другими схемами, взлётно-посадочная площадка;
- компактность трансмиссии, которая расположена вдоль вала винтов;
- сравнительная простота управления: органы управления расположены рядом с трансмиссией и при совершении манёвров не затрачивается дополнительная мощность двигателей;
- отсутствие критически уязвимых узлов, таких как рулевой винт и его трансмиссия одновинтовых вертолётов;
- значительно бо́льшая при равной тяговооружённости тяга винтов на режиме висения, потому что нет потерь мощности на рулевой винт, а нижний винт находится в воздушном потоке от верхнего винта;
- аэродинамическая симметрия схемы и значительно меньшие перекрёстные взаимосвязи каналов управления;
- уменьшение вибраций, чему способствуют меньшие размеры несущих винтов;
- безопасность для обслуживающего персонала: отсутствие хвостового винта уменьшает вероятность травм.
- нет необходимости в производстве, ремонте и обслуживании рулевого винта
Недостатки:
- относительная сложность производства, ремонта и обслуживания несущего винта
- сравнительно большая высота вертолёта вследствие большого расстояния между винтами, это в свою очередь увеличивает аэродинамическое сопротивление, которое отрицательно сказывается на максимальной горизонтальной скорости;
- вероятность перехлеста лопастей на критических режимах полёта (перехлест может наступать приблизительно в таких же режимах полёта, что и у несущего винта с хвостовой балкой классической схемы);
- несколько бо́льшая скорость снижения на режиме авторотации;
- более трудное обеспечение путевой устойчивости из-за присущего схеме короткого фюзеляжа, поэтому большинство соосных вертолётов имеет развитое вертикальное оперение.[21]
Перекрещивающиеся лопасти

Несущие винты расположены по бокам фюзеляжа со значительным перекрытием, а их оси наклонены наружу под углом друг к другу, исключая таким образом возможность перехлёста. Фактически такая схема является частным случаем поперечной схемы с максимально возможным перекрытием несущих винтов, в то же время обладает свойствами соосной схемы. Из-за наклона винтов реактивные моменты уравновешиваются только относительно вертикальной оси, а их проекции относительно поперечной оси складываются, образуя момент тангажа.[22]
Первые серийные вертолёты этой схемы Флеттнер FI 282 «Колибри» появились в Германии в 1942 году. В настоящий момент единственным серийным производителем подобных вертолётов является американская компания Kaman Aircraft. Отличительной особенностью данной фирмы являются использование в системе управления вертолётом сервозакрылок, установленных на лопастях, принцип действия которых схож с элероном самолёта.
Достоинства:
- минимальные габаритные размеры;
- простая и лёгкая трансмиссия;
- малый относительный вес конструкции;
- симметричность в отношении аэродинамики.
Недостатки:
- ухудшение коэффициента полезного действия несущих винтов вследствие взаимного влияния их друг на друга;
- возникновение продольного момента, усложняющего балансировку вертолёта.
Многовинтовая схема
В основном вертолёты данной конструкции используют четыре винта, одна пара из которых расположены в продольной схеме, а другая — в поперечной, хотя встречаются конструкции как с тремя несущими винтами (Ми-32, Cierva Air Horse), так и с большим числом винтов (Мультикоптер).
Отличается большим весом, но вместе с тем простотой управления, так как такая схема не требует автомата перекоса, а направление полёта задаётся регулированием мощности на каждом из винтов в отдельности.
В настоящий момент пользуется все большей популярностью в радиоуправляемых вертолётах.
Схема изначально была представлена в прототипах начала двадцатого века на заре авиации.
К вертолётам такой схемы можно отнести квадрокоптер Георгия Ботезата, бывшего профессора Петроградского технологического института, эмигрировавшего в Америку; вертолёт Этьена Эмишена, который помимо 4 несущих винтов имел 6 небольших пропеллеров для поддержания равновесия и 2 винта для горизонтального полёта[23]
К многовинтовой схеме можно отнести и некоторые конвертопланы, например Curtiss-Wright X-19, Bell X-22, Bell Boeing Quad TiltRotor(проект).
Примечания
- Богданов и др., 1990, с. 14.
- Мир вертолётов. Поиски схемы. aviastar.org. Дата обращения: 4 апреля 2012.
- Achenbach 1874 Вертолёт Аченбаха, 1874 (англ.). aviastar.org. Дата обращения: 4 апреля 2012.
- Одновинтовые вертолёты с фенестроном " Малая энциклопедия вертолётостроения. Всё про вертолёты
- Вертолёт Юрьева 1910 года
- История вертолётных рекордов — 0051.htm (недоступная ссылка)
- Вертолёт Кёртиса-Бликкера. http://aviastar.org.+Дата обращения: 4 апреля 2012.
- Вертолёт Doblhoff WNF 342. http://www.aviastar.org.+Дата обращения: 4 апреля 2012.
- Реактивные вертолёты. http://www.aviastar.org.+Дата обращения: 4 апреля 2012.
- Портативный вертолёт Глухарёва Meg-1. http://www.aviastar.org.+Дата обращения: 4 апреля 2012.
- Яковлев ЯК-24 Транспортно-десантный вертолёт Архивная копия от 6 декабря 2016 на Wayback Machine // vertopedia.ru
- Поль Корню. Изобретатель первого вертолёта.
- Российские немцы. История и современность Архивная копия от 19 апреля 2012 на Wayback Machine // rdinfo.ru
- Яковлев Як-24 // airwar.ru
- Boeing Vertol СН-47 CHINOOK Многоцелевой транспортный вертолёт Архивная копия от 13 октября 2016 на Wayback Machine // vertopedia.ru
- Вертолёт Берлинера
- Вертолёт Хиллер Xh-44-r. http://www.aviastar.org.+Дата обращения: 4 апреля 2012.
- Gyroplane Laboratoire. http://www.aviastar.org.+Дата обращения: 4 апреля 2012. Архивировано 19 июня 2012 года.
- Вертолёт Ка-8. http://www.aviastar.org.+Дата обращения: 4 апреля 2012.
- Яковлев ЭГ
- Практическая аэродинамика вертолёта Ка-26 / К. Н. Лалетин. — М.: «Транспорт», 1974.
- Богданов и др., 1990, с. 16.
- В арьергарде авиации. Дата обращения: 4 апреля 2012.
Литература
- Конструкция вертолётов: Учебник для авиационных техникумов / Ю. С. Богданов, Р. А. Михеев, Д. Д. Скулков. — М.: Машиностроение, 1990. — 272 с.: ил. — ISBN 5-217-01047-9; ББК 39,57я723 Б73; УДК 629.735.45.0.
- Аэродинамический расчёт вертолётов / Академик Б. Н. Юрьев. — М.: Государственное издательство оборонной промышленности, 1956. — 272 с.: ил.
- Винтовые летательные аппараты / Камов Н. И.. — М.: Оборонгиз, 1948.