Радиоуправляемый вертолёт
Радиоуправляемый вертолёт — это масштабная модель вертолёта, которая управляется с помощью радио- или инфракрасной связи. Как правило, управление такими моделями происходит с небольшого расстояния (до 100 м), то есть в таких пределах видимости управляющего, когда он гарантировано видит положение и направление движения модели. В любительской среде иногда встречаются модели, управляемые с помощью транслируемых моделью телеметрии и видеосигнала с бортовой камеры[1]. Специализированные и военные модели чаще управляются заданием маршрута по координатным точкам[2]. Фактически является микроклассом БПЛА. Реже, чем масштабные, встречаются полноразмерные модели серийных вертолётов, подлежащих утилизации и переделанных для использования в качестве подскакивающей воздушной мишени (практикуется в США с 1960-х гг. при испытаниях новых зенитных ракет для выяснения эффективности их применения по внезапно появляющимся целям и времени на приведение в боевую готовность).

История[3]
Долгое время создать радиоуправляемую модель вертолёта не удавалось. До апреля 1970 года лучшие из попыток заканчивались полётами продолжительностью до десятка секунд. Настоящим прорывом эта область обязана немецкому инженеру Шлютеру. Он применил двухлопастной несущий ротор с циклическим изменением шага лопастей и стабилизирующими лопатками. В основе ротора лежала карданная головка с поперечной сквозной спицей, на концах которой были закреплены управляющие лопатки. Схема получила название Bell-Hiller. Никаких принципиальных инноваций в радиоуправляемых моделях вертолёта с тех пор сделано не было, кроме разработки электронных систем стабилизации, которые позволяют использовать более простые несущие роторы без стабилизирующих лопаток.
Классификация РУ вертолётов
Силовая установка

В качестве силовой установки обычно используются 2-тактные калильные двигатели внутреннего сгорания (далее ДВС) или электрические бесколлекторные двигатели в связке с литий-полимерными аккумуляторными батареями. Электрический вариант на данный момент более распространён в связи с простотой использования и относительной дешевизной установки. Также, на РУ вертолёты устанавливают бензиновые и газотурбинные двигатели.
С калильными ДВС
ДВС (работающий на смеси нитрометана, метанола и касторового/синтетического масла) вертолёты делятся на классы, в зависимости от объёма двигателя:
- 30 класс, объём двигателя 0,30 куб. дюйма (5,5 см³)
- 50 класс, объём двигателя 0,50 куб. дюйма (8,2 см³)
- 60 класс, объём двигателя 0,6 куб. дюйма (10 см³)
- 90 класс, объём двигателя 0,9 куб. дюйма (15 см³)
Чем больше объём двигателя, тем длиннее лопасти он может раскрутить, следовательно и сама модель крупнее. Время полёта таких вертолётов от 7 до 14 минут, в зависимости от объёма двигателя, тюнинга и стиля пилотирования.
С бензиновыми ДВС
Вертолёты с бензиновой силовой установкой являются довольно неплохой заменой калильным ДВС, к плюсам можно отнести:
- Меньший расход топлива.
- Дешевизну бензина (примерно в 20 раз дешевле) относительно топлива для калильных ДВС.
- Относительную «чистоту» выхлопа (вертолёт и его оборудование остаётся достаточно чистым после полётов).
- Высокую продолжительность полётов.
К минусам же можно отнести:
- Большие размеры: вертолёты с бензиновым ДВС — это модели класса 90 ввиду больших размеров установки.
- Не очень большая тяговооружённость: бензиновый двигатель гораздо тяжелее калильного, а прибавка в мощности не столь велика. Так что при размерах 90 класса, модель получается довольно вялая.
- Сложность конструкции в целом и, зачастую, необходимость переделки рамы для установки двигателя.
Большое количество минусов с лихвой покрывают эти плюсы, поэтому модели с бензиновым ДВС не обрели столь широкую популярность среди моделистов.
С электродвигателями
Долгое время электрические вертолёты использовали в основном в помещении ввиду малого размера и отсутствия выхлопа. Затем появились большие модели электровертолётов, предназначенных для полёта на открытых пространствах и исполнения сложных манёвров. ДВС вертолёты также возможно оборудовать электродвигателем с помощью специальных наборов (китов) или вручную.
Самый маленький РУ электровертолёт в мире — Silverlit Nano Falcon[4] (надо заметить, что этот вертолёт управляется при помощи инфракрасного излучения, а не радиоволн).
Различают классы вертолётов:
- 100: длина лопасти основного ротора 70-190 мм, полётный вес модели 50-150 грамм;
- 250: длина лопасти основного ротора 200—210 мм, полётный вес модели 250—350 грамм;
- 400: длина лопасти основного ротора 230—250 мм, полётный вес модели 300—500 грамм;
- 450: длина лопасти основного ротора 290—350 мм, полётный вес модели 800—1200 грамм;
- 500: длина лопасти основного ротора 420—450 мм, полётный вес модели 1700—2200 грамм;
- 550 (30-й класс): длина лопасти основного ротора 550—570 мм, полётный вес модели 2500-3500 грамм;
- 600 (50-й класс): длина лопасти основного ротора 600—620 мм, полётный вес модели 3300-4000 грамм;
- 700 (60-й класс): длина лопасти основного ротора 690—720 мм, полётный вес модели >4000 грамм;
С газотурбинными двигателями
В моделях вертолётов, так же могут использовать и турбореактивные двигатели. В целом устройство довольно просто: поток воздуха от турбины попадает на крыльчатку винта, который в свою очередь передаёт крутящий момент на основной ротор. Но проблема заключается в том, что для правильной работы турбины, необходимо установить большое количество дорогостоящей электроники для управления подачей топлива, температурой, оборотами и дросселем. Ввиду этих фактов, турбины используют в вертолётах крайне редко и в основном в копийных моделях, для создания большей реалистичности.
По схеме механического управления

Существует несколько основных конструкций РУ вертолётов, отличающиеся стабильностью или манёвренностью. Маневренность даёт больше возможностей для исполнения сложного пилотажа, но добавляет сложности в управлении.
- Классическая схема (несущий винт + рулевой винт) с управлением коллективным шагом.
- Классическая схема (несущий винт + рулевой винт) без управления коллективным шагом.
- Соосная схема: пара разнонаправленных несущих винтов на одной оси. Данный вид моделей обладает гораздо большей стабильностью по сравнению с классической схемой, что делает модель идеальной для новичков и/или полётов в закрытом помещении. Но у этой схемы есть минусы:
- большинство таких моделей обладают фиксированным шагом, что значительно упрощает модель, но ухудшает управление модели по курсу
- невозможность полётов на улице в ветреную погоду.
- Многовинтовая схема (мультикоптер): всё большую популярность при создании самостабилизирующихся микровертолётов и микровертолётов с автопилотом набирает многовинтовая схема (на жаргоне моделистов — «мультикоптер»), а чаще всего — квадрокоптер — схема с четырьмя винтами, расположенными на концах осесимметричной крестовины. При этом используется как схема Х так и +. Помимо квадрокоптеров используются схемы с 3, 6, 8 лучами. На каждом луче может устанавливаться как один, так и два винта.
- Другие (например, продольная схема: два разнонаправленных несущих винта).
Электронное оборудование
Аппаратура управления
Ввиду сложности механического управления, вертолётные передатчики должны обладать функцией микширования каналов, к примеру: «кривая» шаг/газ.
Цены на передатчики варьируются от $100 до $2000. Самые известные производители радио аппаратуры: JR, Spektrum, Futaba, Hitec, Sanwa (так же известна как «Airtronics» в Северной Америке). Более бюджетные Turnigy.
Модуляция
Передатчики излучают ЧМ сигнал в двух видах модуляции.
PPM дешевле, чем PCM, и в основном используется в дешёвых моделях вертолётов. Большая вероятность помех не позволяет установку такого оборудования на крупные модели ввиду высокой опасности в случае помехи. Передатчики высокого класса предоставляют как PCM-, так и PPM-модуляцию для большей совместимости с большим количеством приёмников.
PCM
Импульсно-кодовая модуляция — схема, в которой требуемое положение для каждой сервомашинки передаётся в виде закодированного числа. Производители используют свой собственный метод кодирования этого числа с разным количеством бит и точностью. JR использует Z-PCM (10 бит, 512 значений) затем S-PCM (11 бит, 1024 значений).
PPM
Импульсно-позиционная модуляция — схема, в которой для каждой позиции сервомашинки передаётся определённая длительность импульса.
Spread spectrum

Методы расширения спектра — система, основанная на смене частоты в канале 2,4 ГГц, вместо использования разных частот в мегагерцовом диапазоне, эта система не использует только одну частоту, а меняет её на протяжении всего полёта.
Управление
Аппаратура управления даёт возможность изменять коллективный шаг и подачу воздушно-топливной смеси в двигатель (посредством так называемых кривых в графиках, также может использоваться гувернёр для контроля за дроссельной заслонкой), коллективный шаг и шагом хвостового ротора. Такая аппаратура позволяет радиоуправляемому вертолёту исполнять все манёвры, на которые способен настоящий вертолёт, такие как висение и полёт хвостом вперёд, а также огромное количество манёвров, на которые обычные вертолёты не способны.
За управление на самом вертолёте отвечают так называемые сервомоторы (сервомашинки или просто серво). Сервомашинки связаны с тарелками автоматов перекоса несущего винта (1-4 шт), отвечая за коллективный и циклический шаг несущего винта (или винтов); и рулевого винта (1 шт).
РУ вертолёт обладает нулевой собственной стабильностью по оси курса. Для решения этой проблемы применяются электронные пьезо-гироскопы. На основе сигнала полученного с гироскопа электроника демпфирует угловые перемещения модели вокруг оси курса[5]. Таким образом без команды на изменение курса с пульта аппаратуры управления вертолёт либо не изменяет курс, либо устанавливает хвостовую балку по реальному полёту модели. Гироскоп связан с сервомашинкой управляющей шагом рулевого винта в классической схеме либо с «V-tail» микшером обоих двигателей в соосной схеме. В микромоделях классической схемы гироскоп управляет оборотами рулевого винта.
В большинстве своём устройство модели вертолёта схоже с полноразмерными вертолётами. Рынок, однако, предлагает широкое разнообразие упрощённых вариантов. Модели могут различаться по количеству каналов управления:

2-канальные. Управляется посредством изменения оборотов несущего винта (винтов) и вращением вокруг собственной оси. Последнее реализуется либо с помощью изменения оборотов рулевого винта, либо (в соосной схеме) изменением скорости вращения одного (или обоих) из несущих винтов. Модель балансируется так, чтобы при полёте она с небольшой скоростью шла вперёд по курсу.
3-канальные. В отличие от 2-канальных моделей, добавлена возможность управлением тангажом. Реализуется либо автоматом перекоса, либо небольшим специальным винтом, расположенным на балке и направленным вверх.
4-канальные. В отличие от 3-канальных моделей, добавлена возможность управлением креном. Управление по каналам тангажа и крена реализуется автоматом перекоса (Например, E-sky Lama).
5-канальные. В отличие от 4-канальных моделей, добавлена возможность управления коллективным шагом несущего винта. Управление хвостовой балкой осуществляется путём изменения шага рулевого винта.
6-канальные. В отличие от 5-канальных моделей, добавлена возможность управления чувствительностью гироскопа.
7-9-канальные. Более шести каналов требуют пилотажные модели вертолётов. Как правило, один канал требуется для управления иглой карбюратора (регулировка смеси) и пара каналов для управления гувернером. Последний требуется для поддержания заданных оборотов ротора вне зависимости от значения шага. Для выполнения большинства фигур пилотажа удобнее сохранение постоянных оборотов ротора, поскольку при смене оборотов заметно меняется реакция на ручку шаг-газ. Гувернер, измеряя обороты основного ротора, управляет дроссельной заслонкой так, чтобы обороты оставались неизменными.
Независимо от перечисленного радиоуправляемые вертолёты могут иметь каналы управления дополнительными, не относящиеся непосредственно к управлению полётом, функциями (уборка/выпуск шасси, прожекторы, огни, камеры и прочее). Эти каналы, как правило, дискретные.
Наиболее популярные радиоуправляемые вертолёты обычно имеют 4 и более каналов:
- Элероны (Крен — Циклический шаг);
- Элеватор (Тангаж — Циклический шаг);
- Руддер (Рысканье);
- Коллективный Шаг/Дроссель(Шаг/Газ).
Для исполнения сложного пилотажа необходимо настроить специальный режим «idle». В этом режиме диапазон шага начинается в его максимальном отрицательном шаге и заканчивается в максимально положительном (обычно от −10° до +10°). С другой стороны кривую газа настраивают так, что в крайних положениях ручки шаг/газ заслонка открыта на максимум, а в центре заслонка открыта на своё минимальное необходимое значение. Такая настройка позволяет менять направление тяги создаваемой основным ротором с целью получения возможности пилотировать модель в перевёрнутом состоянии.
В случае с циклическим шагом и рысканием, пилоты обычно не применяют никаких изменений при переключения из нормального режима полёта в режим «idle». При необходимости, современные аппаратуры управления позволяют изменять и подстраивать их под свой стиль пилотирования.
Вспомогательное оборудование

Одним из видов вспомогательного оборудования новичка является тренировочное шасси. Оно представляет собой, как правило, четыре карбоновых или металлических стержня с пластиковыми шариками на концах с одной стороны. Противоположными сторонами стержни соединяются через специальную муфту, образуя крестообразную составляющую, центр которой находится под центрами масс модели и укрепляется на лыжах модели либо специальными защелками, либо, по выходу их из строя, пластиковым монтажными стяжками. Существует вариант крепления двух стержней друг к другу попарно, а потом их крест накрест крепят к лыжам. В таком исполнении «тапки» менее отрицательно влияют на управляемость модели и тем не менее уменьшают вероятность поломок модели при жёсткой посадке или падении. Как было отмечено ранее, Т. Ш. отрицательно сказываются на летных характеристиках модели и используются лишь при первых шагах или освоении новых первых фигурах полётов (блинчики и восмерки в положении отличном от хвостом к себе).
К дополнительному бортовому оборудованию можно отнести:
- FPV (First Person View) — комплект приемопередающего оборудования для полётов собственно по видео. Включает в себя бортовую камеру и передатчик, устанавливаемые на борт, а также приёмник и монитор, установленные на земле. Монитор в большинстве случаев выполняется в виде очков или маски, надеваемых на лицо пилота. Управление ведется не по наглядному наблюдению за моделью со стороны, а по бортовой камере. Дополнительно можно установить блок, дающий телеметрию борта на экран пилота: горизонт, угол атаки, координаты, азимут, скорость, высота, бортовое напряжение, ток и т. п.
- Онлайн-регистраторы координат
- Оборудование подачи звукового сигнала при низком заряде силовых батарей или поиска упавшей в высокой траве модели.
- Системы развлекательного характера, сбрасывающие с борта разного рода предметы в целях увеселения публики, наблюдающей за полётами.
Конструкция и материалы
Обычно при изготовлении вертолёта применяют следующие материалы: пластик, алюминий, стеклопластик и карбон. Лопасти делают из дерева, стеклопластика и карбона. Модели продаются в полусобранном состоянии (ARF, Almost Ready to Fly, почти готовые к полёту) и в виде наборов для самостоятельной сборки (Kit), также в полностью собранном и укомплектованном электроникой состоянии (RTF, Ready to Fly, готов к полёту). Также некоторые вертолеты поставляются в собранном состоянии, но без аппаратуры управления (BNF, Bind and fly, «подключи и лети»).
Как правило, устройство модели вертолёта схоже с полноразмерными вертолётами. Устройство модели вертолёта требует более точного исполнения, нежели модели самолёта, ввиду присутствия вибраций, влияющих на управляемость.
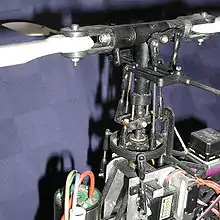
В дополнение ко всему маленький размер и вес РУ вертолёта делают управление моделью, особенно циклический шаг, сверхманевренным и избыточным. Из этих соображений, на моделях вертолётов не используют обычную (более простую) систему управления автоматом перекоса Белла, вместо неё используют систему Белла-Хиллера (Bell-Hiller mixing), которая использует т. н. сервоось (flybar). Эта конструкция обладает отличной стабильностью системы Хиллера и быстротой системы Белла.
В некоторых моделях используется система Белла, её принято называть системой без сервооси (flybarless), в таких моделях необходимо использование электронных систем стабилизации, которые электронным способом заменяют механическую сервоось. Примеры таких систем: V-bar, SK360 и т. д.
Также встречаются РУ вертолёты (преимущественно первые вертолёты классической схемы для новичков с фиксированным шагом FP, то есть РУ вертолёты классической схемы без управления коллективным шагом) которые оборудованы только системой Хиллера, например вертолёт Esky Honey Bee FP. Чистая система управления по Хиллеру, та, в которой тарелка перекоса соединена с флайбаром и флайбар в свою очередь управляет шагом лопастей. Результат — очень стабильный вертолёт, практически приближающийся по стабильности к РУ вертолётам соосной схемы, в то же время менее боящийся ветра, которому однако не хватает чистоты и возможностей прямого управления системы Белла.
РУ вертолёты для специальных целей
РУ вертолёты используют не только для пилотажа или копийного полёта, но и для других целей: видео- и фотосъёмка с высоты, наблюдение за местностью и т. д. (см. например ZALA 421-06). Некоторые фирмы-производители предлагают специально спроектированные для этих целей модели вертолётов. Для удобства панорамных съёмок и съёмок с высоты на такие вертолёты установлена видео/фото камера HD качества. А на пульт управления выведены кнопки управления записью. Такие вертолёты получили широкое применение в кинематографе и любительских экстрим-съёмках. Также появились вертолёты с камерой и экраном на пульте управления — управлять такими моделями возможно не поднимая глаз от передатчика.
См. также
Примечания
- (англ.) Примеры использования аппаратуры управления по видеоканалу и телеметрическим данным с модели. Архивная копия от 2 декабря 2018 на Wayback Machine
- Например, Ка-37 (БПЛА).
- (рус.) Виктор Ходеев. История создания радиоуправляемых вертолетов.
- Silverlit Nano Falcon.
- (рус.) Виталий Пузрин. Гироскопы на радиоуправляемых моделях.
Ссылки
- RC Helicopter Wiki — A wiki dedicated to RC helicopters
- Dedicated Encyclopedia For Electric RC Flight
- A comprehensive R/C Helicopter links directory
- A complete description of the operating principles behind the flybar and Hiller/Bell-Hiller style rotor heads
- Fixed Pitch Vs Collective Pitch RC Helicopters
- RCHeli.dk A useful resource if you are thinking about starting on flying RC helicopter, with a pilot locator and a field locator. And a personal blog about flying
- India based discussion site for RC Helicopters
- Radio Controlled Helicopters Buying Guide — Radio Controlled Machines
- RC Heli Talk — A forum dedicated to electric rc helicopter, grat place for beginners and advance fliers to get help.
- RC Heli Club — MAAC sanctioned RC heli club dedicated to RC helicopters for professional and beginner pilots located in Edmonton, Alberta Canada.
- — Настройка тренировочного вертолета. Автор: Шон Китчен с дополнениями aarc Перевод: aarc.
- 3D пилотаж на T-rex 600