Автоколебания
Автоколеба́ния — незатухающие колебания в диссипативной динамической системе с нелинейной обратной связью, поддерживающиеся за счёт энергии постоянного, то есть непериодического внешнего воздействия.[1]
Автоколебания отличаются от вынужденных колебаний тем, что последние вызваны периодическим внешним воздействием и происходят с частотой этого воздействия, в то время как возникновение автоколебаний и их частота определяются внутренними свойствами самой автоколебательной системы.
Термин автоколебания в русскоязычную терминологию введён А. А. Андроновым в 1928 году.
Примеры
Примерами автоколебаний могут служить:
- незатухающие колебания маятника часов за счёт постоянного действия тяжести заводной гири;
- колебания скрипичной струны под воздействием равномерно движущегося смычка
- возникновение переменного тока в цепях мультивибратора и в других электронных генераторах при постоянном напряжении питания;
- колебание воздушного столба в трубе орга́на, при равномерной подаче воздуха в неё. (см. также Стоячая волна)
- флаттер и бафтинг элементов конструкции летательного аппарата.
Автоколебания лежат в основе многих явлений природы:
- колебания листьев растений под действием равномерного потока воздуха;
- образование турбулентных потоков на перекатах и порогах рек;
- голоса людей, животных и птиц образуются благодаря автоколебаниям, возникающим при прохождении воздуха через голосовые связки;
- действие регулярных гейзеров и пр.
На автоколебаниях основан принцип действия большого количества всевозможных технических устройств и приспособлений, в том числе:
- работа всевозможных часов, как механических, так и электрических;
- звучание всех духовых и струнно-смычковых музыкальных инструментов;
- действие всевозможных генераторов электрических и электромагнитных колебаний, применяемых в электротехнике, радиотехнике и электронике;
- работа поршневых паровых машин и двигателей внутреннего сгорания;
- некоторые системы автоматического регулирования работают в режиме автоколебаний, когда регулируемая величина колеблется в окрестности требуемого значения, то превышая его, то опускаясь ниже него, в допустимом для целей регулирования диапазоне (например, система терморегулирования бытового холодильника).

В то же время, в некоторых технических системах автоколебания могут возникать без специального намерения конструкторов этих систем, в результате неудачного выбора их технических параметров. Такие автоколебания могут быть нежелательными (например, «рычание» водопроводного крана при определённых расходах воды), а зачастую разрушительными, являющимися причиной аварий c тяжёлыми последствиями, когда речь идёт о системах с большими уровнями энергии, циркулирующей в них. Например:
- в турбинах электростанций;
- в реактивных авиационных (помпаж) и ракетных двигателях;
- в магистралях газов и жидкостей высокого давления;
- флаттер различных элементов летательных аппаратов;
- ветровой резонанс — автоколебания высотных сооружений со значительным аэродинамическим сопротивлением при воздействии ветра определённой скорости (возникновение вихрей Кармана) и др.
Механизм автоколебаний
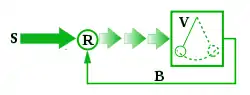
Автоколебания могут иметь различную природу: механическую, тепловую, электромагнитную, химическую. Механизм возникновения и поддержания автоколебаний в разных системах может основываться на разных законах физики или химии. Для точного количественного описания автоколебаний разных систем может потребоваться разный математический аппарат. Тем не менее, можно представить схему, общую для всех автоколебательных систем, качественно описывающую этот механизм (рис. 1).
На схеме: S — источник постоянного (непериодического) воздействия; R — нелинейный регулятор, преобразующий постоянное воздействие в переменное (например, в прерывистое во времени), которое и «раскачивает» осциллятор V — колеблющийся элемент (элементы) системы, а колебания осциллятора через обратную связь B управляют работой регулятора R, задавая фазу и частоту его действия. Диссипация (рассеивание энергии) в автоколебательной системе возмещается за счёт поступления в неё энергии из источника постоянного воздействия, благодаря чему автоколебания не затухают.

Если колеблющийся элемент системы способен к собственным затухающим колебаниям (т. н. гармонический диссипативный осциллятор), автоколебания (при равенстве диссипации и поступления энергии в систему за время периода) устанавливаются на частоте, близкой к резонансной для этого осциллятора, их форма становится близкой к гармонической, а амплитуда, в некотором диапазоне значений, тем больше, чем больше величина постоянного внешнего воздействия.
Примером такого рода системы может служить храповой механизм маятниковых часов, схема которого представлена на рис. 2. На ось храпового колеса A (которое в этой системе выполняет функцию нелинейного регулятора) действует постоянный момент силы M, передающийся через зубчатую передачу от заводной пружины или от гири. При вращении колеса A его зубцы сообщают кратковременные импульсы силы маятнику P (осциллятору), благодаря которым его колебания не затухают. Кинематика механизма играет роль обратной связи в системе, синхронизируя вращение колеса с колебаниями маятника таким образом, что за полный период колебания колесо поворачивается на угол, соответствующий одному зубцу.
Автоколебательные системы, не содержащие гармонических осцилляторов, называются релаксационными. Колебания в них могут сильно отличаться от гармонических, и иметь прямоугольную, треугольную или трапецеидальную форму. Амплитуда и период релаксационных автоколебаний определяются соотношением величины постоянного воздействия и характеристик инерционности и диссипации системы.
Простейшим примером релаксационных автоколебаний может служить работа электрического звонка, изображённого на рис. 3. Источником постоянного (непериодического) воздействия здесь является электрическая батарея U; роль нелинейного регулятора выполняет прерыватель T, замыкающий и размыкающий электрическую цепь, в результате чего в ней возникает прерывистый ток; колеблющимися элементами являются магнитное поле, периодически наводимое в сердечнике электромагнита E, и якорь A, движущийся под воздействием переменного магнитного поля. Колебания якоря приводят в действие прерыватель, что и образует обратную связь.
Инерционность этой системы определяется двумя различными физическими величинами: моментом инерции якоря А и индуктивностью обмотки электромагнита E. Увеличение любого из этих параметров приводит к увеличению периода автоколебаний.
При наличии в системе нескольких элементов, колеблющихся независимо друг от друга, и одновременно воздействующих на нелинейный регулятор или регуляторы (которых тоже может быть несколько), автоколебания могут принимать более сложный характер, например, апериодический, или динамический хаос.
Молоток Маклакова
Молоток, совершающий удары за счёт энергии переменного тока с частотой, во много раз меньшей частоты тока в электрической цепи[2].
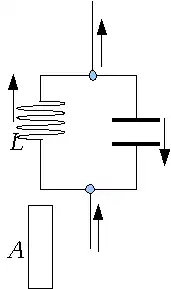
Катушка L колебательного контура помещается над столом (или другим предметом, по которому требуется ударять). Снизу в неё входит железная трубка, нижний конец которой является ударной частью молотка. В трубке есть вертикальная прорезь, чтобы уменьшить токи Фуко. Параметры колебательного контура такие, что собственная частота его колебаний совпадает с частотой тока в цепи (например, переменного городского тока, 50 герц).
После включения тока и установления колебаний наблюдается резонанс токов контура и внешней цепи, и железная трубка втягивается в катушку. Индуктивность катушки растёт, колебательный контур выходит из резонанса, а амплитуда колебаний тока в катушке уменьшается. Поэтому трубка возвращается в исходное положение — вне катушки — под действием силы тяжести. Затем колебания тока внутри контура начинают нарастать, и снова наступает резонанс: трубка опять втягивается в катушку.
Трубка совершает автоколебания, то есть периодические движения вверх и вниз, и при этом громко стучит по столу, подобно молотку. Период этих механических автоколебаний в десятки раз превосходит период переменного тока, поддерживающего их.
Молоток назван по имени М. И. Маклакова, лекционного ассистента Московского физико-технического института, предложившего и осуществившего такой опыт для демонстрации автоколебаний.
См. также
Примечания
- Воздействие может быть периодическим, например вибрации, и при этом в системе будут возникать автоколебания со своей частотой, отличной от частоты вибраций. В частности, это может происходить благодаря осреднённым вибрационным явлениям, например в случае средних течений, возбуждаемых в вязких пограничных слоях жидкости (слои Стокса, механизм Шлихтинга). Так это происходит при автоколебаниях границы раздела двух жидкостей в осциллирующей системе.
- Сивухин Д. В. Общий курс физики. — М.. — Т. III. Электричество.
Литература
- Андронов А. А., Витт А. А., Хайкин С. Э. Теория колебаний. — М.: Наука, 1937.
- Физика. Большой энциклопедический словарь / Гл. ред. А. М. Прохоров. — 4-е изд. — М.: Большая Российская энциклопедия, 1999. — С. 85—88. — ISBN 5-85270-306-0.
- В. А. Вавилин. Автоколебания в жидкофазных химических системах // Природа. — 2000. — № 5.
- Харкевич А. А. Автоколебания. М.: ГИТТЛ, 1954.
- A. Jenkins. Self-oscillation // ArXiv.org. — 2011. — P. 1—17.