Эллиптический фильтр
Эллиптический фильтр (фильтр Кауэра, или фильтр Золотарёва, или фильтр Золотарёва—Кауэра) — электронный фильтр, характерной особенностью которого являются пульсации амплитудно-частотной характеристики как в полосе пропускания, так и полосе подавления. Величина пульсаций в каждой из полос независима друг от друга. Другой отличительной особенностью такого фильтра является очень крутой спад амплитудной характеристики, поэтому с помощью этого фильтра можно достигать более эффективного разделения частот, чем с помощью других линейных фильтров.
Если пульсации в полосе подавления равны нулю, то эллиптический фильтр становится фильтром Чебышёва I рода. Если пульсации равны нулю в полосе пропускания, то фильтр становится фильтром Чебышёва II рода. Если же пульсации отсутствуют на всей амплитудной характеристике, то фильтр становится фильтром Баттерворта.
Амплитудно-частотная характеристика эллиптического фильтра низких частот является функцией круговой частоты ω и задаётся следующим выражением:

где Rn — рациональная эллиптическая функция n-го порядка и
- — частота среза
- — показатель пульсаций (англ. ripple factor)
- — показатель селективности (англ. selectivity factor)



Значение показателя пульсаций определяет пульсации в полосе пропускания, пульсации же в полосе подавления зависят как от показателя пульсаций, так и от показателя селективности.
Свойства
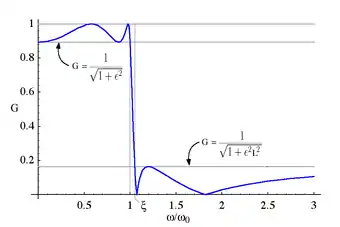
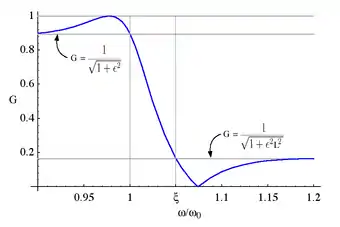
- В полосе пропускания эллиптическая функция меняет значения от нуля до единицы. АЧХ в полосе пропускания, таким образом, варьирует от единицы до .

- В полосе подавления эллиптическая функция меняет значения от бесконечности до значения , которое определяется как:

- АЧХ в полосе подавления, таким образом, меняет значения от нуля до .


- Предельный случай превращает эллиптическую функцию в многочлен Чебышёва, и, таким образом, эллиптический фильтр становится фильтром Чебышёва I рода с показателем пульсаций ε.
- Так как фильтр Баттерворта является предельным случаем фильтра Чебышёва, то при выполнении условий , и так что эллиптический фильтр становится фильтром Баттерворта.
- Предельный случай , и так что и превращает эллиптический фильтр в фильтр Чебышёва II рода с АЧХ







Полюсы и нули
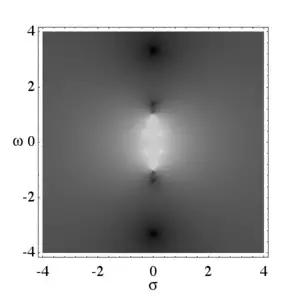


Нули модуля АЧХ совпадают с полюсами дробно-рациональной эллиптической функции.
Полюса эллиптического фильтра могут быть определены так же, как и полюса фильтра Чебышёва I рода. Для простоты примем частоту среза равной единице. Полюса эллиптического фильтра будут нулями знаменателя амплитудной характеристики. Используя комплексную частоту получим:



Пусть , где cd — эллиптическая косинус-функция Якоби. Тогда, используя определение эллиптической дробно-рациональной функции, получим:


где and . Разрешив относительно w



где значения обратной cd-функции сделаны явными при помощи целого индекса m.
Полюса эллиптической функции в таком случае:

Как и в случае многочленов Чебышёва, это можно выразить в явной комплексной форме [1]




где — функция от , а и — нули эллиптической функции. Функция определена для всех n в смысле эллиптической функции Якоби. Для порядков 1 и 2 имеем





где

Рекурсивные свойства эллиптических функций можно использовать для построения выражений более высокого порядка для :

где

Эллиптические фильтры с минимальной добротностью
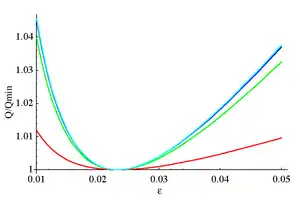
См.[2] Эллиптические фильтры обычно определяются путём задания определённой величины пульсаций в полосе пропускания, полосе подавления и крутизной амплитудной характеристики. Эти характеристики являются определяющими для задания минимального порядка фильтра. Другой подход к проектирования эллиптического фильтра заключается в определении чувствительности амплитудной характеристики аналогового фильтра к значениям его электронных компонент. Эта чувствительность обратно пропорциональна специальному показателю (добротности) полюсов передаточной функции фильтра. Добротностью полюса определяется как:

и является мерой влияния данного полюса на общую амплитудную характеристику. Для эллиптического фильтра заданного порядка существует связь между показателем пульсаций и фактором селективности, который минимизирует добротность всех полюсов передаточной функции:

Это приводит к существованию фильтра, наименее чувствительного к изменению параметров компонент фильтра, однако при таком способе проектирования теряется возможность независимо назначать величину пульсаций в полосе пропускания и полосе подавления. Для таких фильтров при увеличении порядка пульсации как в полосе подавления, так и в полосе пропускания уменьшаются, а крутизна характеристики вокруг частоты среза увеличивается. При расчёте фильтра с минимальной добротностью необходимо учитывать, что порядок такого фильтра будет больше, чем при обычном методе расчёта. График модуля амплитудной характеристики будет выглядеть практически так же, как и раньше, однако полюса будут располагаться не по эллипсу, а по кругу, причём в отличие от фильтра Баттерворта, полюса которого также располагаются по кругу, расстояние между ними будет неодинаковым, а на мнимой оси будут располагаться нули.
Сравнение с другими линейными фильтрами
Ниже представлены графики амплитудно-частотных характеристик некоторых наиболее распространённых линейных электронных фильтров с одинаковым количеством коэффициентов:
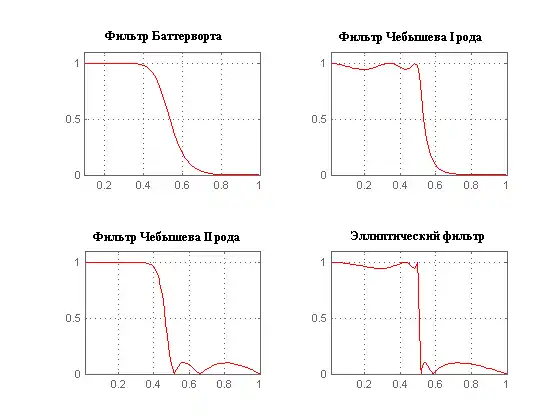
Как следует из графика, эллиптический фильтр имеет наибольшую крутизну характеристики, однако он также обладает и значительными пульсациями как в полосе пропускания, так и в полосе подавления.
См. также
Библиография
- В.А. Лукас. Теория автоматического управления. — M.: Недра, 1990.
- Б.Х. Кривицкий. Справочник по теоретическим основам радиоэлектроники. — М.: Энергия, 1977.
- Miroslav D. Lutovac. Filter Design for Signal Processing using MATLAB© and Mathematica©. — New Jersey, USA.: Prentice Hall, 2001. — ISBN 0-201-36130-2.
- Richard W. Daniels. Approximation Methods for Electronic Filter Design. — New York: McGraw-Hill, 1974. — ISBN 0-07-015308-6.
- Steven W. Smith. The Scientist and Engineer’s Guide to Digital Signal Processing. — Second Edition. — San-Diego: California Technical Publishing, 1999. — ISBN 0-9660176-4-1.
- Britton C. Rorabaugh. Approximation Methods for Electronic Filter Design. — New York: McGraw-Hill, 1999. — ISBN 0-07-054004-7.
- B. Widrow, S.D. Stearns. Adaptive Signal Processing. — Paramus, NJ: Prentice-Hall, 1985. — ISBN 0-13-004029-0.
- S. Haykin. Adaptive Filter Theory. — 4rd Edition. — Paramus, NJ: Prentice-Hall, 2001. — ISBN 0-13-090126-1.
- Michael L. Honig, David G. Messerschmitt. Adaptive Filters — Structures, Algorithms, and Applications. — Hingham, MA: Kluwer Academic Publishers, 1984. — ISBN 0-89838-163-0.
- J.D. Markel, A.H. Gray, Jr. Linear Prediction of Speech. — New York: Springer-Verlag, 1982. — ISBN 0-387-07563-1.
- L. R. Rabiner, R.W. Schafer. Digital Processing of Speech Signals. — Paramus, NJ: Prentice-Hall, 1978. — ISBN 0-13-213603-1.
- Richard J. Higgins. Digital Signal Processing in VLSI. — Paramus, NJ: Prentice-Hall, 1990. — ISBN 0-13-212887-X.
- A. V. Oppenheim, R. W. Schafer. Digital Signal Processing. — Paramus, NJ: Prentice-Hall, 1975. — ISBN 0-13-214635-5.
- L. R. Rabiner, B. Gold. Theory and Application of Digital Signal Processing. — Paramus, NJ: Prentice-Hall, 1986. — ISBN 0-13-914101-4.
- John G. Proakis, Dimitris G. Manolakis. Introduction to Digital Signal Processing. — Paramus, NJ: Prentice-Hall, 1988. — ISBN 0-02-396815-X.
Примечания
- Miroslav D. Lutovac. § 12.8 // Filter Design for Signal Processing using MATLAB© and Mathematica©.
- Miroslav D. Lutovac. § 12.11, § 13.14 // Filter Design for Signal Processing using MATLAB© and Mathematica©.