Сервейер-1
«Серве́йер-1» (англ. Surveyor 1) — беспилотный космический аппарат НАСА, запущенный в 1966 году и предназначенный для исследований Луны. Второй в истории посадочный модуль, совершивший мягкую посадку на небесное тело (после советской «Луны-9», прилунившейся за 4 месяца до этого).
| Сервейер-1 | |
|---|---|
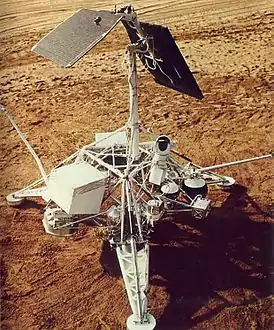 «Сервейер-1» на Земле | |
| Заказчик |
|
| Производитель |
|
| Оператор | НАСА |
| Задачи | Исследование Луны с её поверхности |
| Стартовая площадка |
|
| Ракета-носитель | «Атлас-Центавр» |
| Запуск | 30 мая 1966 года в 14:41:00 UTC |
| Длительность полёта | 65 часов |
| COSPAR ID | 1966-045A |
| SCN | 02185 |
| Технические характеристики | |
| Масса | 995 кг при взлёте и 292 кг при посадке |
| Источники питания | Солнечные батареи |
| Элементы орбиты | |
| Посадка на небесное тело | 2 июня 1966 года 6:17:37 UTC |
| Координаты посадки | 2°27′ ю. ш. 43°13′ з. д.2,45° ю. ш. 43,22° з. д. в Океане Бурь |
| Целевая аппаратура | |
| Телевизионная камера | предоставление фотографий, сделанных вблизи поверхности Луны. |
Этот космический аппарат был первым в серии беспилотных аппаратов «Сервейер», предназначенных для мягкой посадки на поверхность Луны[1]. «Сервейер-1» был запущен 30 мая 1966 года, с космодрома на мысе Канаверал, штат Флорида, и успешно прилунился 2 июня 1966 года в Океане Бурь. После мягкой посадки на Луну аппарат начал собирать данные, необходимые для подготовки к пилотируемым полётам программы «Аполлон».
«Сервейер-1» передал на Землю 11 237 фотоснимков лунной поверхности при помощи телевизионной камеры и сложных радиотелеметрических систем[1].
Программа «Сервейер» управлялась Лабораторией реактивного движения в Лос-Анджелесе; сборкой и проектированием аппарата занималась компания «Хьюз Эйркрафт» (Эль-Сегундо, штат Калифорния)[1].
Цели миссии


Среди целей миссии «Сервейер-1» значились:
- изучение лунного рельефа;
- исследование гравитационного поля Луны;
- изучение различных физических условий на лунной поверхности;
- телесъёмка поверхности Луны.
Устройство
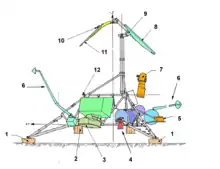
Серия космических аппаратов «Сервейер» была разработана с целью совершения мягкой посадки на Луну. Рама аппарата сделана из тонкостенных алюминиевых труб. Она представляет собой треножник из трёх посадочных опор длиной 4,3 м с амортизаторами и тарелями. Подошвы опорных тарелей и амортизирующие блоки, укреплённые на каждой опоре, выполнены из алюминиевых сот, за счет деформации которых поглощается энергия посадочного удара. В двух отсеках с контролируемой температурой размещена электронная аппаратура, на вертикальной мачте высотой 1 м, укреплённой на вершине треножника, находятся солнечная батарея и планарная узконаправленная антенная решётка[1].
Аппарат имел основной тормозной твердотопливный двигатель и три служащих для управления посадкой жидкостных двигателя, а также двигатели ориентации, питаемые сжатым азотом.
На «Сервейере-1» были установлены две телевизионные камеры на видиконах (одна из них была направлена вниз) и около 100 датчиков для измерения температур, напряжений, положения подвижных элементов аппарата, а также акселерометры. Специальной научной аппаратуры на «Сервейере-1» не было. Телевизионная система массой 7,31 кг могла работать в двух режимах: с разложением изображения на 200 или на 600 строк. Её угловое разрешение составляло 0,5 миллирадиана по уровню 15 % отклика, что вдвое лучше среднего углового разрешения человеческого глаза; это обеспечивало линейное разрешение 0,5 мм на расстоянии 1,6 м от камеры (соответствующее расстоянию от камеры до конца посадочной опоры). Фокусное расстояние объектива менялось в пределах от 25 до 100 мм и обеспечивало поле зрения от 25,3 до 6,43 квадратного градуса (от ~3° до 0,36° по горизонтальной стороне кадра). Ирисовая диафрагма изменяла относительное отверстие камеры от f/4 до f/22. Камера могла быть направлена в любом направлении по азимуту, а по углу места от +40° до −65° к плоскости горизонта; она могла фокусироваться на расстояниях от 1,23 м до бесконечности и была оборудована турелью с цветовыми светофильтрами. Для калибровки телекамеры на посадочной опоре № 2 была установлена фотометрическая мишень[2]. На всех аппаратах серии «Сервейер», кроме «Сервейера-1», устанавливались зеркала, позволявшие вести съемку в местах, недоступных для прямой видимости телекамеры.
В составе аппарата находились солнечный датчик и датчик опорной звезды Канопус, а также несколько радиолокаторов, служащих для определения скорости спуска и расстояния до лунной поверхности. Радиовысотомер давал сигнал на выключение тормозного двигателя. Другой высотомер с помощью бортового компьютера управлял двигателями малой тяги[1].
Посадочное устройство аппарата при старте находилось в сложенном состоянии и развертывалось только лишь после того, как аппарат выводился на траекторию полета к Луне. Максимальный диаметр «Сервейера-1» составлял 4,27 м, а высота (при сложенном шасси) около 3 м[1].
Доставка аппаратов «Сервейер» к Луне осуществлялась ракетной системой «Атлас-Центавр», а посадка в заданную точку — с помощью основного тормозного твердотопливного двигателя, который заканчивал свою работу и отбрасывался на высоте около 10 км, после чего замедление спуска осуществлялось жидкостными двигателями[1].
Радиосвязь аппарата обеспечивалась планарной подвижной узконаправленной антенной решёткой, использовавшейся для передачи телесигнала, двумя всенаправленными коническими антеннами, расположенными на концах складных стрел и предназначавшимися для передачи телеметрии и приёма команд, а также двумя приёмниками и двумя передатчиками. Источниками электропитания служили солнечная батарея (792 отдельных элемента общей площадью 0,855 м2, мощность до 85 ватт) и два серебряно-цинковых химических источника тока (один из них заряжаемый).
Один из отсеков с контролируемой температурой (от +5 до +50 °C) содержал всю электронику связи и блок питания. Второй, где температура поддерживалась в диапазоне от −20 до +50 °C, предназначался для электроники, которая дешифровала команды и обрабатывала сигналы.
Ориентация в полёте контролировалась с помощью солнечного и звёздного (по Канопусу) датчиков, а также гироскопического трёхосного измерителя. Управление ориентацией осуществлялось двигателями ориентации на сжатом азоте. Три жидкостных реактивных двигателя с регулируемой тягой (от 130 до 460 Н в вакууме) использовали гидрат монометилгидразина (H2N-NHCH3·H2O) в качестве топлива и смесь оксидов азота MON-10 (90 % N2O4, 10 % NO) в качестве окислителя. Топливо и окислитель хранились в сферических баках, закреплённых на раме-треножнике.
Описание миссии
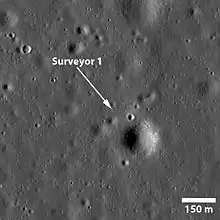
«Сервейер-1» был запущен 30 мая 1966 года в 14:41:00 UT с помощью ракеты-носителя «Атлас-Центавр», сразу направившись с сторону Луны, без выхода на низкую околоземную орбиту. В ходе полёта в 06:45 UT 31 мая была выполнена коррекция траектории. На расстоянии 75,3 км от поверхности Луны по сигналу от радара был запущен тормозной твердотопливный двигатель, горевший в течение 40 секунд и затормозивший аппарат со скорости 2612 м/с до 110 м/с (относительно поверхности); после этого на высоте около 11 км двигатель был отстрелен, и дальнейшее торможение осуществлялось жидкостными двигателями под управлением бортового компьютера, получавшего данные от радиовысотомера и доплеровского измерителя скорости. «Сервейер-1» осуществил успешное прилунение в 6:17:36 UT 2 июня 1966 года в юго-восточной части Океана Бурь в точке с координатами 2°28′28″ ю. ш. 43°20′23″ з. д.2,4745° ю. ш. 43,3398° з. д.[3] (в 50 км к северо-северо-востоку от кратера Флемстид). Двигатели были выключены на высоте 3,4 метра от поверхности Луны. Удар о поверхность, произошедший с вертикальной скоростью около 3,6 м/с и горизонтальной составляющей 0,3 м/с, погасили амортизированные опоры. Аппарат после первого контакта подскочил примерно на 6 см и через 1,0 секунды вновь встал на поверхность. Записи показаний датчиков натяжения во время удара позволили определить механические свойства поверхности; в частности, динамическое давление, выдержанное грунтом во время удара, составляло 300...700 Па[2].
Продолжительность полета «Сервейера-1» составила примерно 63 часа и 30 минут. Стартовый вес аппарата составлял 995,2 кг, а при прилунении (израсходовалось топливо для маневрирования, а также отделился основной тормозной двигатель и радиолокационный высотомер) около 294,3 кг[1].
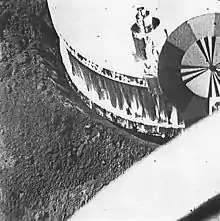
«Сервейер-1» начал телевизионную съемку поверхности Луны через час после прилунения. На момент посадки Солнце находилось на высоте 28° над восточным горизонтом, двигаясь к верхней кульминации. В течение первого лунного дня, до захода Солнца 14 июня, аппарат передал 10 338 фотографий. Поскольку Луна всегда обращена к Земле одной стороной, поддержка радиосвязи с «Сервейером-1» требовала только смен наземных станций, из-за постоянного вращения Земли. Электроэнергия не вырабатывалась во время двухнедельных лунных ночей (так как аппарат работал от солнечных батарей), поэтому ночью «Сервейер-1» находился в бездействии, потребляя электроэнергию только от аккумулятора для обогрева электроники (за исключением короткого времени сразу после захода Солнца 14 июня, когда были выполнены 84 фотографии солнечной короны над горизонтом[4]). Во время второго лунного дня новая передача фотографий началась в лунный полдень, 7 июля. За второй лунный день были переданы 899 фотографий. Сразу после начала второй лунной ночи, 13 июля в 7:30 UT, миссия была прекращена ввиду значительного падения напряжения бортовой аккумуляторной батареи. Однако попытки возобновить связь продолжались до 7 января 1967 года. В общей сложности «Сервейер-1» передал на Землю 11 240 фотографий[1].
Галерея

См. также
- Лунная программа «Сервейер»
- «Луна-9» — первое успешное прилунение в истории космонавтики.
Примечания
- NASA: Surveyor 1
- Surveyor 1 preliminary results (англ.) // Science. — 1966. — Vol. 152, iss. 3730 (June 24, 1966). — P. 1737—1750. — doi:10.1126/science.152.3730.1737.
- Координаты указаны по измерениям LRO в 2009 году; измерения конца 1960-х давали более низкую точность позиционирования.
- Surveyor Program Results. NASA, SP-184, Wash., D.C., 1969.
Литература
- Jaffe L. D. et al., Surveyor 1 mission report, JPL, Calif. Inst. Technol., TR 32-1023, Pts. 1, 2, and 3, Pasadena, CA, Aug. 1966.
- Jaffe L. D. Lunar surface exploration by Surveyor spacecraft (англ.) // J. Geophys. Res.. — 1967. — Vol. 72, iss. 2. — P. 773—778. — doi:10.1029/JZ072i002p00773.
- Surveyor 1: a preliminary report, NASA, SP-126, Wash., D.C., 1966.
- Surveyor Program Results. NASA, SP-184, Wash., D.C., 1969.