Лидар
Лида́р ( транслитерация LIDAR англ. Light Detection and Ranging «обнаружение и определение дальности с помощью света») — технология измерения расстояний путем излучения света (лазер) и замера времени возвращения этого отражённого света на приёмник.

Лидар как прибор представляет собой, как минимум, активный дальномер оптического диапазона.
- Сканирующие лидары в системах машинного зрения формируют двумерную или трёхмерную картину окружающего пространства.
- «Атмосферные» лидары способны не только определять расстояния до непрозрачных отражающих целей, но и анализировать свойства прозрачной среды, рассеивающей и поглощающей свет.
- Разновидностью атмосферных лидаров являются доплеровские лидары, определяющие направление и скорость перемещения воздушных потоков в различных слоях атмосферы.
Устоявшийся перевод LIDAR как «лазерный радар» не вполне корректен, так как в системах ближнего радиуса действия (например, предназначенных для работы в помещениях), главные свойства лазера: когерентность, высокие плотность и мгновенная мощность излучения — не востребованы; излучателями света в таких системах могут служить обычные светодиоды. Однако в основных сферах применения технологии (метеорология, геодезия и картография) с радиусами действия от сотен метров до сотен километров используются только лазеры.
История
Аббревиатура LIDAR впервые появилась в работе Миддлтона и Спилхауса «Метеорологические инструменты» 1953 года, задолго до изобретения лазеров.[1] Первые лидары использовали в качестве источников света обычные или импульсные лампы со скоростными затворами, формировавшими короткий импульс.[2]
США
В 1963 году в США начались полевые испытания носимого лазерного дальномера XM-23 с мощностью излучения 2,5 Вт и диапазоном измеряемых расстояний 200—9995 м.[3]. XM-23 был изначально несекретным образцом и стал базовым прибором для гражданских исследователей 1960-х годов.[4] К концу 1960-х годов лазерные дальномеры стали стандартным оборудованием новых танков США (первым образцом, спроектированным с применением лазерных дальномеров, стал M551 Шеридан, запущенный в серию в 1967). Гражданские применения лазерных дальномеров были ограничены лишь высокой стоимостью интегральных схем того времени.
Тогда же, в первой половине 1960-х годов, начались опыты по применению лидара с лазерными излучателями для исследования атмосферы[5].
В 1969 году лазерный дальномер и мишень, установленная на Аполлоне-11, применялся для измерения расстояния от Земли до Луны. Четыре мишени, доставленные на Луну тремя «Аполлонами» и «Луноходом-2», и по сей день используются для наблюдения за орбитой Луны[6][7].
В течение 1970-х годов, с одной стороны, отлаживалась технология лазерных дальномеров и компактных полупроводниковых лазеров, а с другой — были начаты исследования рассеяния лазерного луча в атмосфере. К началу 1980-х годов эти исследования стали настолько известными в академических кругах США, что аббревиатура LIDAR стала именем нарицательным — lidar, что зафиксировал словарь Уэбстера 1985 года.[2] В те же годы лазерные дальномеры достигли стадии зрелой технологии (по крайней мере, в военных приложениях) и выделились в отдельную от лидаров отрасль техники[8].
СССР
Эксперименты по лазерной локации Луны в СССР начались в 1963 году, а с 1973 года велись систематические наблюдения всех пяти расположенных к тому времени на Луне уголковых отражателей («Лунохода-1», «Лунохода-2», «Аполлона-11», «Аполлона-14», «Аполлона-15»)[9]:263,267,272. Для лазерной локации искусственных спутников Земли в СССР были запущены спутники с уголковыми отражателями на борту: «Интеркосмос-17» (1977), «Интеркосмос-Болгария-1300» (советско-болгарский, 1981), «Метеор-3» (1985), использовался разработанный советскими учёными лазерный дальномер «Крым»[10]:321,323.
В СССР существовало два семейства лидарных метеорологических приборов, предназначенных для использования на аэродромах (в обоих семействах в качестве источника зондирующего светового потока использовались импульсные лампы):
- Измерители высоты нижней границы облаков — светолокаторы (в начале 1960-х годов создан прибор ИВО-1, далее в 1970-х годах ИВО-2, РВО-2). Принцип действия светолокатора основан на измерении обратно рассеянного зондирующего импульса в атмосфере.
- Измерители дальности видимости — трансмиссометры (созданный в конце 1960-х годов прибор РДВ-1, в последующие десятилетия ему на смену пришли РДВ-2, РДВ-3, ФИ-1). Принцип действия трансмиссометра (регистратора прозрачности атмосферы) основан на измерении степени ослабления интенсивности световых импульсов после их прохождения через слой атмосферы, ограниченный длиной базисной линии прибора.
Принцип действия
В отличие от радиоволн, эффективно отражающихся только от достаточно крупных металлических целей, световые волны подвержены рассеянию в любых средах, в том числе в воздухе, поэтому возможно не только определять расстояние до непрозрачных (отражающих свет) дискретных целей, но и фиксировать интенсивность рассеивания света в прозрачных средах. Возвращающийся отражённый сигнал проходит через ту же рассеивающую среду, что и луч от источника, подвергается вторичному рассеиванию, поэтому восстановление действительных параметров распределённой оптической среды — достаточно сложная задача, решаемая как аналитическими, так и эвристическими методами.
Устройство
Основные различия в конструкциях и принципах действия современных лидаров заключаются в модулях формирования развертки. Развертка может формироваться как механическими методами (с помощью вращающихся зеркал или с помощью движения микроэлектромеханических систем), так и с помощью фазированной антенной решетки[11].
Излучатель
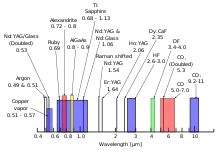
В абсолютном большинстве конструкций излучателем служит лазер, формирующий короткие импульсы света высокой мгновенной мощности. Периодичность следования импульсов или модулирующая частота выбираются так, чтобы пауза между двумя последовательными импульсами была не меньше, чем время отклика от обнаружимых целей (которые могут физически находиться дальше, чем расчётный радиус действия прибора). Выбор длины волны зависит от функции лазера и требований к безопасности и скрытности прибора; наиболее часто применяются Nd:YAG-лазеры и длины волн (в нанометрах):
- 1550 нм — инфракрасное излучение, невидимое ни глазу человека, ни типичным приборам ночного видения. Глаз не способен сфокусировать эти волны на поверхности сетчатки, поэтому травматический порог для волны 1550 существенно выше, чем для более коротких волн. Однако риск повреждения глаз на деле выше, чем у излучателей видимого света — так как глаз не реагирует на ИК излучение, то не срабатывает и естественный защитный рефлекс человека
- 1064 нм — ближнее инфракрасное излучение неодимовых и иттербиевых лазеров, невидимое глазу, но обнаружимое приборами ночного видения
- 532 нм — зелёное излучение неодимового лазера, эффективно «пробивающее» массы воды
- 355 нм — ближнее ультрафиолетовое излучение
Также возможно использование (см. Промышленные и сервисные роботы) вместо коротких импульсов непрерывной амплитудной модуляции излучения переменным напряжением.
Системы формирования сканирующего паттерна
Большинство современных лидаров используют цилиндрическую развертку. Этот тип развертки наиболее просто формируется и прост в дальнейшей обработке. Однако у него есть недостатки. Например, при использовании цилиндрической развертки есть вероятность пропустить узкие горизонтальные объекты (такие как шлагбаум). Чаще всего эта проблема решается применением дополнительного лидара с цилиндрической разверткой, но ориентированного перпендикулярно первому лидару.
Помимо цилиндрической развертки существуют лидары с разверткой "розетка" (англ. "Rosette scanning pattern"). Формирование данной развертки происходит сложнее, чем формирование цилиндрической развертки, однако лидары с разверткой "розетка" не испытывают проблем, описанных выше.
Сканирующая оптика

Простейшие атмосферные лидарные системы не имеют средств наведения и направлены вертикально в зенит.
Для сканирования горизонта в одной плоскости применяются простые сканирующие головки. В них неподвижные излучатель и приёмник также направлены в зенит; под углом 45° к горизонту и линии излучения установлено зеркало, вращающееся вокруг оси излучения. В авиационных установках, где надо сканировать полосу, перпендикулярную направлению полёта самолёта-носителя, ось излучения — горизонтальна. Для синхронизации мотора, вращающего зеркало, и средств обработки принимаемого сигнала используются точные датчики положения ротора, а также неподвижные реперные риски, наносимые на прозрачный кожух сканирующей головки.
Сканирование в двух плоскостях добавляет к этой схеме механизм, поворачивающий зеркало на фиксированный угол с каждым оборотом головки — так формируется цилиндрическая развёртка окружающего мира. При наличии достаточной вычислительной мощности можно использовать жёстко закреплённое зеркало и пучок расходящихся лучей — в такой конструкции один «кадр» формируется за один оборот головки.
Сканирование с помощью MEMS
Производить сканирование можно также и с помощью микроэлектромеханических систем. Такие системы позволяют значительно сократить габариты и повысить надежность изделий.
Активная фазированная антенная решетка
Активная фазированная антенная решетка формирует лазерный луч множеством передающих модулей, каждый из которых генерирует излучение со своими параметрами. Таким образом можно управлять направлением луча. Применение ФАР в лидарах позволяет избавиться от подвижных частей и таким образом продлить срок жизни изделию.
Приём и обработка сигнала
Важную роль играет динамический диапазон приёмного тракта. Например, приёмный тракт новейшей (2006 год) подсистемы машинного зрения MuCAR-3 с динамическим диапазоном 1:106 обеспечивает эффективный радиус действия от 2 до 120 м (всего 1:60). Чтобы избежать перегрузки приёмника интенсивной засветкой от рассеивания в «ближней зоне», в системах дальнего радиуса действия применяют высокоскоростные механические затворы, физически блокирующие приёмный оптический канал. В устройствах ближнего радиуса со временем отклика менее микросекунды такой возможности нет.
Современное состояние и перспективы
Исследования атмосферы
Исследования атмосферы стационарными лидарами является наиболее массовой отраслью применения технологии. В мире развёрнуто несколько постоянно действующих исследовательских сетей (межгосударственных и университетских), наблюдающих за атмосферными явлениями.
Измерение высоты нижней границы облаков. В России выпускаются светолокаторы ДВО-2 [12] (с импульсной лампой в качестве источника света), лазерные светолокаторы ДОЛ-2.[13] и лазерный облакомер для измерения высоты нижней границы облаков и вертикальной видимости [14] Также широко используются лазерные светолокаторы CL31 финского производства.[15]
Измерение дальности видимости. В России производятся трансмиссометры ФИ-3 [16], используются также финские трансмиссометры LT31.[17] В обоих приборах источником излучения является полупроводниковый светодиод.
Измерение скорости и направления воздушных потоков. Теоретическое обоснование применения наземного доплеровского лидара для таких измерений было дано ещё в 1980-е годы.[18] Первые практические разработки использовали неподвижные оптические системы с лучом, направленным вертикально в зенит; в 1990-е годы были предложены технологии, позволяющие доплеровским лидарам сканировать широкий угол обзора.[19] В 2001 Alcatel предложил размещение лидаров на борту спутников, так, что «созвездие» спутников на орбите способно отслеживать движение воздушных масс в рамках целого континента, а в потенциале — на Земле в целом.[20] Лидары активно используются для наблюдений за загрязнением атмосферы. Особый класс дифференциальных лидаров (differential absorption lidar, DIAL), излучающих одновременно свет с разной длиной волны, способен эффективно определять концентрацию отдельных газов, оптические показатели которых зависят от длины волны.
Измерение температуры атмосферы. Разработано и реализовано на практике несколько основных методов измерения профилей температуры.
В первом методе используется резонансное рассеяние на атомах щелочных металлов, в частности, натрия, калия, а также железа[21][22][23]. Облака атомов металлов находятся на высоте 85 — 100 км. Температура измеряется по доплеровскому уширению резонансных линий с помощью зондирования узкополосным подстраиваемым лазером (используются жидкостные лазеры с активным веществом в виде раствора органического красителя). Первые измерения были осуществлены с помощью искусственных натриевых облаков, забрасываемых в атмосферу ракетами. Несмотря на то, что метод ограничен диапазоном высот, на которых присутствуют атомы металла, рассеянный сигнал оказывается относительно большим, и это дает возможность измерять температуру с точностью до 1.5 ˚К[24].
Второй метод — метод рэлеевского рассеяния (Rayleigh lidar), основан на нерезонансном рассеянии света на молекулах воздуха[22][25][26]. Впервые он был применен в 1953 году в опытах с прожекторным зондированием атмосферы[27]. Суть метода заключается в следующем. Если отсутствует аэрозольное рассеяние, то мощность обратно рассеянного сигнала прямо пропорциональна плотности воздуха, из которой можно рассчитать температуру. Разрежение воздуха с высотой позволяет использовать метод рэлеевского рассеяния на высотах не более 90 км. Нижняя граница высоты измерения (около 20-30 км) обусловлена присутствием в граничном слое большого количества аэрозоля, который значительно увеличивает рассеяние, но практически не влияет на плотность воздуха.
Третий метод основан на вращательном рамановском (комбинационном) рассеянии молекулами воздуха (Raman lidar)[22][25]. Когда температура увеличивается, интенсивность переходов с большими квантовыми числами возрастает, в то время как интенсивность линий вращательного рамановского спектра, соответствующих маленьким квантовым числам, уменьшается. Переходы с большими квантовыми числами соответствуют линиям рамановского спектра, расположенным дальше от центральной частоты. Температура определяется при использовании измерений в двух областях спектра с различной температурной зависимостью. Максимальная высота зондирования составляет около 30 км, погрешность измерения менее 1 ˚К до высоты 10 км[28]. Так как в приемнике линия упругого рассеяния подавляется, то измерения можно проводить и в присутствии значительных концентраций аэрозолей.
Измерение температуры может проводиться так же с помощью DIAL лидара[22], но этот метод не получил большого распространения.
Помимо научных целей и метеорологических наблюдений, активно испытываются комплексные системы мониторинга воздушных потоков в районах аэропортов. Среди практических предложений последних лет — системы автоматического управления ветрогенераторами, использующие лидары для определения силы и направления ветра.[29]
Раннее оповещение о лесных пожарах. Лидар, размещённый на возвышенности (на холме или на мачте) и сканирующий горизонт, способен различать аномалии в воздухе, порождённые очагами пожаров. В отличие от пассивных инфракрасных систем, распознающих только тепловые аномалии, лидар выявляет дымы по аномалиям, порождаемым частицами горения, изменению химического состава и прозрачности воздуха и т. п. Технология с радиусом обнаружения дымов в 20 км была впервые заявлена в 1990,[30] активные поиски оптимальных конфигураций систем ведутся по сей день.[31]
Исследования Земли
Вместо установки лидара на земле, где принимаемый отражённый свет будет зашумлён из-за рассеяния в загрязнённых, нижних слоях атмосферы, «атмосферный» лидар может быть поднят в воздух или на орбиту, что существенно улучшает соотношение сигнал-шум и эффективный радиус действия системы. Первый полноценный орбитальный лидар был выведен на орбиту NASA в декабре 1994 года в рамках программы LITE (Lidar In-Space Technology Experiment).[32][33] Двухтонный лидар LITE с метровым зеркальным телескопом, поднятый на высоту 260 км, «рисовал» на земле размытое пятно диаметром 300 м, что было явно недостаточно для эффективного отображения рельефа, и был исключительно «атмосферным».
Особо ценным оказался опыт верификации данных космической съёмки с использованием синхронных данных более 60 наземных лидаров по всему миру.[34]
Первый европейский орбитальный лидар (проект ALADIN) планируется к запуску в 2014 году.[35]
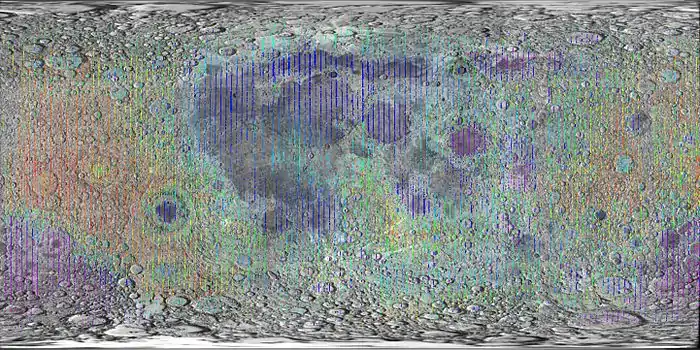
Космическая геодезия. Современные космические проекты разделились на два направления — совершенствование «атмосферных» систем (см. вышеупомянутый проект Alcatel) и геодезические лидары, способные сканировать рельеф земной поверхности с приемлемой разрешающей способностью. Лидары могут применяться как на орбите Земли, так и на орбитах других планет, практический пример тому — бортовой лидар АМС Марс Глобал Сервейор.
Авиационная геодезия, топография и археология. Национальная океанографическая служба США (NOAA) систематически применяет авиационные лидары для топографической съёмки морского побережья. Сканирующий лидар NOAA имеет разрешение по вертикали 15 см и полосу сканирования (при штатной высоте полёта) 300 м. Привязка к абсолютной высоте производится «от уровня моря» (с поправкой на приливы), к географическим координатам — по сигналам GPS.[36] Географическая служба США (USGS) проводит аналогичные топографической съёмки в Антарктиде, данные съёмок USGS находятся в открытом доступе.[37] В 2007 году USGS начал программу по встраиванию данных лидарной съёмки в национальную базу топографических данных США.[38]
Особое направление, применяемое на практике в сейсмоопасных районах США — дифференциальное измерение высот с целью выявления локальных подвижек земных масс в районе разломов. Ещё в 1996 с помощью лидара была открыта неизвестная ранее зона разлома возле Сиэтла.[39]
Мониторинг лесов и биомассы. Космические (например, GLAS — Geoscience Laser Altimeter System) и авиационные лидары позволяют определить высоту растительности, в частности леса. Таким образом, появляется возможность уточнить распространение лесов, вычислить их параметры (фитомасса, запас древесины) и осуществлять мониторинг за динамикой лесного покрова (например, сведение лесов в тропиках).
Воздушное лазерное сканирование местности позволяет получать данные о реальной поверхности земли, исключая искажения от лесных массивов, строении и т. д., также позволяет выявлять неглубоко расположенные археологические объекты культурного слоя[40][41][42]. К примеру, таким образом были обнаружены руины бывших обширных жилых кварталов в джунглях вокруг храма Ангкор-Ват, занимающие более 1 000 км²[43].
Строительство и горное дело

Лидары, сканирующие неподвижные объекты (здания, городской ландшафт, открытые горные выработки), относительно дёшевы: так как объект неподвижен, то особого быстродействия от системы обработки сигнала не требуется, а сам цикл обмера может занимать достаточно долгое время (минуты). Так же, как в своё время падала стоимость лазерных дальномеров и уровней, применяемых в строительстве, следует ожидать дальнейшего снижения цен на строительные и горные лидары, — падение цен ограничено лишь стоимостью прецизионной сканирующей оптики. Типичные отрасли применения:
Маркшейдерское дело — обмеры открытых горных выработок, построение трёхмерных моделей подземных горных пластов (в том числе в связке с сейсмографическими инструментами).
Строительство — обмеры зданий, контроль отклонения плоскостей стен и несущих колонн от вертикали (в том числе в динамике), анализ вибраций стен и остекления. Обмеры котлованов, создание трёхмерных моделей стройплощадок для оценки объёмов земляных работ.
Архитектура — построение трёхмерных моделей городской среды для оценки влияния предлагаемых новостроек на облик города.
Морские технологии
Измерение глубины моря. Для этой задачи используется дифференциальный лидар авиационного базирования. Красные волны почти полностью отражаются поверхностью моря, тогда как зелёные частично проникают в воду, рассеиваются в ней, и отражаются от морского дна. Технология пока не применяется в гражданской гидрографии из-за высокой погрешности измерений и малого диапазона измеряемых глубин.
Поиск рыбы. Аналогичными средствами можно обнаруживать признаки косяков рыбы в приповерхностных слоях воды. Специалисты американской государственной лаборатории ESRL утверждают, что поиск рыбы лёгкими самолётами, оборудованных лидарами, как минимум на порядок дешевле, чем с судов, оборудованных эхолотами.[44]
Спасение людей на море. В 1999 ВМС США запатентовали конструкцию авиационного лидара, применимого для поиска людей и человеческих тел на поверхности моря;[45] принципиальная новизна этой разработки — в применении оптического маскирования отражённого сигнала, снижающего влияние помех.
Разминирование. Обнаружение мин возможно с помощью лидаров, непосредственно погруженных в воду (например, с буя, буксируемого катером или вертолётом), однако не имеет особых преимуществ по сравнению с активными акустическими системами (сонарами). Запатентованы средства обнаружения мин в приповерхностных слоях воды с помощью бортовых авиационных лидаров, эффективность таких лидаров не известна.
Системы подводного зрения. У истоков подводного применения лидаров на море стояла корпорация Kaman, запатентовавшая работоспособную технологию в 1989 году[46]. Интенсивное (по сравнению с воздушной средой) рассеивание света в воде долгое время ограничивало действие подводных лидаров десятками метров. Импульс лазера способен «пробить» и большие расстояния, но при этом полезный отражённый сигнал оказывается неразличим на фоне паразитной засветки. Kaman преодолела эту проблему с помощью электронных затворов, открывавших оптический путь к CCD-приёмнику только на короткий период ожидаемого отклика. Кроме этого, само изображение цели формировалось методом «вычитания тени», существенно повышавшим радиус действия системы. Kaman применяет метод короткого временного окна и к авиационным системам; в них момент открытия оптического канала задаётся высотомером самолёта-носителя.[47]
В последующие годы Kaman развивало тему лидаров как в направлении повышения радиуса действия и надёжности распознавания образов, так и части новых областей применения. Например, в 1999 запатентовано использование лидаров для установления скоростной подводной связи с беспилотными подводными аппаратами (управляемыми торпедами) по оптическому каналу.[48] В 1992 были предложены индивидуальные лидары для водолазов и аквалангистов.[49] Вероятно, что существенный пласт военно-морских разработок остаётся неизвестным широкой публике.
На транспорте
Определение скорости транспортных средств. В Австралии простейшие лидары используются для определения скорости автомобилей — так же, как и полицейские радары. Оптический «радар» существенно компактнее традиционного, однако менее надёжен в определении скорости современных легковых автомобилей: отражения от наклонных плоскостей сложной формы «запутывают» лидар.
Системы активной безопасности.

Беспилотные транспортные средства. В 1987—1995 годах в ходе проекта EUREKA Prometheus, стоившего Европейскому союзу более 1 млрд долларов, были выработаны первые практические разработки беспилотных автомобилей. Наиболее известны прототип, VaMP (разработчик — Университет бундесвера в Мюнхене) не использовал лидары из-за недостатка вычислительной мощности тогдашних процессоров. Новейшая их разработка, MuCAR-3 (2006), использует единственный лидар кругового обзора, поднятый высоко над крышей машины, наравне с направленной мультифокальной камерой обзора вперёд и инерциальной навигационной системой.[50] Лидар MuCAR-3 используется подсистемой выбора оптимальной траектории на пересечённой местности, он даёт угловое разрешение в 0,01° при динамическом диапазоне оптического приёмника 1:106, что даёт эффективный радиус обзора 120 м. Для достижения приемлемой скорости сканирования используется пучок из 64 расходящихся лазерных лучей, поэтому один полный «кадр» требует единственного оборота вращающегося зеркала.[50]
С 2003 года правительство США через агентство передовых военных разработок DARPA финансирует разработку и соревнование автомобилей-роботов. Ежегодно проводятся гонки DARPA Grand Challenge; в гонке 2005 года победила машина из Стэнфорда, в основе системы зрения которой — пять лидаров направленного обзора.
Приспособление от Apple с названием Project Titan для портирования функции автопилота на любой автомобиль было замечено на улицах в октябре 2017. Для тестирования автопилота Apple выбрала автомобиль Lexus RX. На его крышу установили устройство с радаром и 12 лидарами, которые помогают системе изучать окружение.
Системы автоматической стыковки. Канадская компания Optech разрабатывает и производит системы для автоматической стыковки на орбите, основанные на лидарах.[51]
Промышленные и сервисные роботы
Системы машинного зрения ближнего радиуса действия для роботов, основанные на сканирующем лидаре IBM, формируют цилиндрическую развёртку с углом охвата горизонта 360° и вертикальным углом зрения до +30..-30°. Собственно дальномер, установленный внутри сканирующей оптической головки, работает на постоянном излучении малой мощности, модулированном несущей частотой порядка 10 МГц. Расстояние до целей (при несущей 10 МГц — не более 15 м) пропорционально сдвигу фаз между опорным генератором, модулирующим источник света, и ответным сигналом. Лидар IBМ использует простой аналоговый фазовый дискриминатор непрерывного действия и имеет высокую угловую разрешающую способность, на практике ограниченную только быстродействием процессора, обрабатывающего трёхмерную «картинку» лидара, и системы автоматического регулирования уровня сигнала на выходе приёмника (быстрые АРУ вносят в принимаемый сигнал фазовые искажения, медленные — сужают динамический диапазон). В 1990—1994 подобные лидары испытывались в сервисных роботах Джозефа Энгельбергера,[52] однако от использования лидара в серийных изделиях тогда отказались в пользу дешёвых ультразвуковых датчиков.
Разные варианты расшифровки акронима LIDAR
- Laser Induced Differential Absorption Radar (ACAE)
- Laser Induced Direction and Range System (BAJR)
- LASER Infrared RADAR (IEEE)
- LASER Intensity Direction and Ranging (IEEE)
- Light Detection and Range (SAUO)
- Light Detection and Ranging
- Light Detection and Ranging Instrument (SAUO)
- Light Intensity Detection and Ranging (NOAA)
Примечания
- Middleton, W. E. K, and Spilhaus, A. F., Meteorological instruments, University of Toronto, 3rd ed. 1953
- Англ. Американское метеорологическое общество. Музей лидаров (недоступная ссылка). Дата обращения: 27 декабря 2007. Архивировано 27 апреля 2017 года.
- Marcus, I. R., Rangemeter for XM23 Rangefinder, U. S. DoD report of 17/02/1964,
- См., например, Deitz, Paul H., Atmospheric Effects on the Beam Propagation of the XM-23 Laser Rangefinder, Laser Range Instrumentation, SPIE Proceedings Vol. 11. Bellingham, WA: Society for Photo-Optical Instrumentation Engineers, 1967., p.35
- R. T. H. Collis, Lidar: A new atmospheric probe, Quarterly Journal of the Royal Meteorological Society, Volume 92, Issue 392, Pages 220—230, 1966
- Apollo Laser Ranging Experiments Yield Results. From LPI Bulletin, No. 72, NASA, August, 1994
- Lunar Geophysics, Geodesy, and Dynamics by James Williams Jean Dickey in 13th International Workshop on Laser Ranging, October 7-11, 2002, Washington, D. C.
- Практическая и теоретическая сторона разработок 1980-х годов зафиксирована в: Jean Rueger. Electronic Distance Measurement: An Introduction, Springer, 1990, 4th edition 1996, ISBN 978-3-540-61159-2
- Басов Н. Г., Кокурин Ю. Л. Лазерная локация Луны // Наука и человечество, 1986. — М.: Знание, 1986. — С. 262—277.
- Георгиев Н. И., Нойберт Р., Татевян С. К., Хайретдинов К. А. Лазерные спутниковые дальномеры // Наука и человечество, 1989. — М.: Знание, 1989. — С. 314—327.
- Таисия Филиппова. Точки в пространстве. nplus1.ru. Дата обращения: 22 января 2019.
- Датчик высоты облаков ДВО-2 (недоступная ссылка). Дата обращения: 3 мая 2013. Архивировано 5 марта 2016 года.
- Датчик облаков лазерный ДОЛ-2
- Облакомеры. www.lsystems.ru. Дата обращения: 20 августа 2018.
- Измерители высоты облаков CL31
- Измеритель дальности видимости ФИ-3
- Трансмиссометры LT31
- Laser Doppler Velocimetry Applied to the Measurement of Local and Global Wind, J. M Vaughan and P. A. Forrester, Wind Engineering, Vol. 13 No. 1 1989
- U.S. Patent 5 724 125
- U.S. Patent 6 634 600
- Захаров В. М. Метеорологическая лазерная локация / В. М. Захаров, О. К. Костко. — Ленинград: Гидрометеоиздат, 1977. — 222 с.
- Зуев В. Е. Дистанционное оптическое зондирование атмосферы / В. Е. Зуев, В. В. Зуев. — СПб.: Гидрометеоиздат, 1992. — 232 с.
- Кащеев Б. Л. Дистанционные методы и средства исследования процессов в атмосфере Земли / Под общ. ред. Б. Л. Кащеева, Е. Г. Прошкина, М. Ф. Лагутина. — Харьков: Харьк. нац. ун-т радиоэлектроники; Бизнес Информ, 2002. — 426 с.
- Lidar measurements taken with a large-aperture liquid mirror. 2. Sodium resonance-fluorescence system / P.S. Argall, O. N. Vassiliev, R. J. Sica, and et al// Applied Optics. — 2000. — Vol. 39, No. 15. — P. 2393—2400.
- Лазерный контроль атмосферы / Под ред. Э. Д. Хинкли. — М.: Мир, 1979. — 416 с.
- Behrendt A. Combined temperature lidar for measurements in the troposphere, stratosphere, and mesosphere / A. Behrendt, T. Nakamura, T. Tsuda // Applied optics. — 2004. — Vol. 43, No 14. — P. 2930—2939.
- Lidar: range-resolved optical remote sensing of the atmosphere series, Springer series in optical sciences, vol. 102 / C. Weitkamp (Ed.). — New York: Springer, 2005. — 460 p.
- Behrendt A. Combined Raman lidar for the measurement of atmospheric temperature, water vapor, particle extinction coefficient, and particle backscatter coefficient // Applied Optics. — 2002. — Vol. 41, No 36. — P. 7657 — 7666.
- U.S. Patent 7 281 891
- U.S. Patent 4 893 026
- U.S. Patent 7 164 468
- NASA, октябрь 1994
- NASA, официальный сайт программы LITE
- NASA, официальный сайт программы LITE, карта наземных партнёров
- ADM-Aeolus
- Официальный сайт центра береговых работ NOAA (недоступная ссылка). Дата обращения: 30 декабря 2007. Архивировано 14 декабря 2007 года.
- USGS, база данных лидарной топосъёмки
- USGS, национальная база данных высот по США (недоступная ссылка). Дата обращения: 10 марта 2006. Архивировано 10 марта 2006 года.
- Blakely, R.J., Wells, R.E., and Weaver, C.S., 1999, Puget Sound aeromagnetic maps and data, U.S. Geological Survey Open-File Report 99—514, Архивная копия от 20 декабря 2007 на Wayback Machine
- Технологии лазерного сканирования Земли открывают новые возможности / Статья от 02.02.2015 г. на innotechnews.com.
- Воздушное лазерное сканирование и цифровая аэрофотосъёмка / Статья на «АртГео».
- Лазерные снимки раскрывают ужасы Перовой мировой войны / Фоторепортаж на news.mail.ru.
- Затерянный храм в джунглях Ангкор-Ват — Камбоджа / Документальный фильм «Discovery Channel» из серии «Взрывая историю» (на видео 12:05 — 16:10 минуты).
- Сайт ESRL (англ.)
- U.S. Patent 5 989 087
- U.S. Patent 4 862 257
- U.S. Patent 4 964 721
- U.S. Patent 5 442 358
- U.S. Patent 5 353 054
- The Cognitive Autonomous Vehicles of UniBwM: VaMors, VaMP, MuCAR-3 (недоступная ссылка) // Universitaet der Bundeswehr Muenchen 2004
- Optech, официальный сайт (недоступная ссылка). Дата обращения: 30 декабря 2007. Архивировано 13 октября 2006 года.
- Status report, Advanced Technology Program, National Institute of Standards and Technologies, 1995 Архивная копия от 7 декабря 2008 на Wayback Machine Архивная копия от 16 сентября 2008 на Wayback Machine

{kind=link}