SCARA
SCARA (Selective Compliance Articulated Robot Arm) - это кинематика, основанная на рычажной системе, обеспечивающей перемещение конечного звена в плоскости за счет вращательного привода рычагов механизма. Классический SCARA механизм состоит из двух рычагов, соединенных в одной точке, и 2-х независимых приводов, один из которых установлен в сочленении 2-х рычагов и вращает их друг относительно друга, а второй установлен в основании первого рычага и вращает его относительно рабочей плоскости.
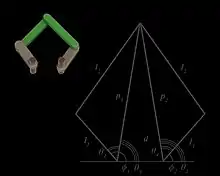
Частным случаем механизма SCARA является 5-рычажный механизм SCARA, в котором для перемещения конечной точки используются 4 рычага и 2 вращающихся привода в основании с несовпадающими осями.


Основные параметры механизмов, построенных на основе SCARA
Установка и ориентация
На место установки и ориентацию влияют требуемая зона охвата и расположение объектов, с которыми должен работать робот SCARA. Основная задача – совместить зону охвата робота с требуемой рабочей зоной. При необходимости выполнения сложных задач или при необходимости перемещения по 4 и более осям роботы с картезианской механикой более сложны и громоздки. SCARA роботы занимают меньшее пространство и проще при монтаже.
Ориентация объектов, с которыми работает робот, также проще в случае работы SCARA робота. Манипулятор SCARA имеет возможность работать и поворачивать детали под любым углом. Для достижения такой же гибкости в работе картезианский робот должен иметь дополнительный модуль подачи, который увеличивает нагрузку на ось Z, снижая тем самым допустимую полезную нагрузку.
Большинство механизмов SCARA может быть монтировано на любой плоскости (на стене, потолке, полу) без изменения их эксплуатационных свойств. Это преимущество широко используется в производственных помещениях, имеющих ограниченный объем.
Скорость и перемещение
Важнейшей характеристикой промышленного механизма помимо полезной нагрузки является скорость выполнения заданной операции.
В настоящий момент SCARA роботы показывают очень высокие скорости перемещения. Как и в случае картезианского исполнения, номинальные рабочие скорости перемещения зависят от мощности привода и параметров кинематических передач (передаточное отношение редуктора). В общем случае, роботы SCARA характеризуются более высокой скоростью по сравнению с картезианской механикой и дельта-роботами.
Точность и повторяемость
Для механики, выполненной по принципу SCARA, характерна неоднородность разрешающей способности перемещения в плоскости X-Y. Для механизмов SCARA принято говорить о градиенте разрешающей способности в заданной плоскости. Максимальная точность (наименьшая абсолютная погрешность и наибольшая разрешающая способность) наблюдается в начале координат (в центре механизма). По мере удаления от центра (с увеличением длины рычага, т.е. удлинением «руки» SCARA), разрешающая способность ухудшается.
За счет отсутствия растягивающихся элементов (приводных ремней) в конструкции, механизм SCARA характеризуется высокой повторяемостью результатов перемещения без изменения точности. Это означает, что роботы SCARA могут выполнять последовательные идентичные операции без малейших отклонений.
Ограничение нагрузки
Допустимая нагрузка складывается из двух составляющих - веса рабочего инструмента и веса груза (либо усилия, действующие в рабочей области механизма). В случае использования механики SCARA, нагрузка прикладывается к рабочей области, находящейся на конце вытянутого рабочего плеча механизма (вытянутой «руки» робота). Это приводит к некоторым ограничениям по нагрузке и необходимости увеличивать прочность и жесткость элементов механизма.
Ключевые особенности механизмов, построенных по принципу SCARA
- Чаще имеют превосходящие эксплуатационные показатели (скорость, нагрузка) по сравнению со сравнимыми по габаритам и весу картезианскими роботами.
- Имеют меньшие габариты и вес по сравнению с аналогичными по эксплуатационным свойствам картезианскими роботами.
- Могут выполнять более сложные задачи по сравнению с классическими картезианскими устройствами.
- Требуют более сложной электроники, математическое описание для контроллера перемещений более сложное, чем для картезианских механизмов.
- Высокая точность и повторяемость результатов выполнения операций.
- Более высокая стоимость обусловлена более сложной математикой и меньшей распространенностью.
- Имеют ограничения жесткости по осям X-Y.
- Вибрация и шум при работе SCARA механизма существенно ниже по сравнению с картезианскими устройствами.
Применение
Изначально механика SCARA разрабатывалась для перемещения, монтажа и сборки и особо широкое распространение получила в электронной промышленности и конвейерных системах. В настоящее время коммерческое применение SCARA чаще всего упоминается в контексте робототехники при создании манипуляторов. Как принято называть, робот – это автоматическое устройство, предназначенное для осуществления различного рода механических операций, которое действует по заранее заложенной программе. В последние годы данная технология успешно применяется в сфере 3D-печати для создания 3D принтеров, где кроме технологии SCARA также популярны картезианская, дельта и полярная типы механики, и все они обладают своими преимуществами[1].
Основные современные типы устройств с использованием механики SCARA
Применительно к роботам, использующим механику SCARA в настоящее время, можно выделить две большие группы:
- Промышленные роботы (манипуляторы, транспортные механизмы)
- ЧПУ координатные машины (малогабаритные фрезерные станки, граверы, 3D принтеры)
Промышленные роботы
Принципиально новая конфигурация манипулятора промышленного робота, созданная в Японии учеными университета Яманаси, появилась впервые в 1981 г. и получила название «SCARA» (Selective Compliance Assemble Robot Arm - рука сборочного робота с избирательной податливостью). В отличие от робота, действующего в угловой системе координат, вращающиеся сочленения SCARA расположены в горизонтальной, а не в вертикальной плоскости с использованием вертикальной подвижности для поступательного движения захватного устройства. Такая конфигурация, сочетая свойства угловой и цилиндрической систем координат, оказалась весьма эффективной. За счет высокой жесткости в вертикальном направлении роботы типа SCARA могут нести значительно более высокие полезные нагрузки, чем другие сборочные роботы, и в то же время весьма удобны для выполнения сборочных операций. Схема получила широкое распространение для сборочных роботов, и ряд фирм, в том числе и такая всемирно известная, как IBM (США), на основе лицензионных соглашений производят сборочные роботы этого типа; одна из наиболее совершенных японских моделей получила название "SKILAM", что означает "ловкая рука".
ЧПУ координатные машины на основе механики SCARA
Любая ЧПУ координатная машина предназначена для перемещения рабочего инструмента по заданным координатам. В большинстве случаев это перемещения по координатам XYZ, хотя работа с полярными координатами также не исключается. Правила работы инструмента и алгоритм перемещения по координатам прописывается в специальном машинном коде. Чаще всего используется широко распространенный G-код. Существует огромное количество подобных ЧПУ машин: от небольших координатных столов и 3D принтеров до полноценных фрезерных ЧПУ станков. Ввиду ограниченной жесткости в плоскости XY, применение ЧПУ машин на основе механики SCARA имеет определенные ограничения. Благодаря преимуществам устройств SCARA по скорости, размерам и весу, их используют в малогабаритных станках для легких ЧПУ операций (гравирование, обработка мягких материалов) и 3D принтерах. Скорость обработки и свойства обрабатываемых на SCARA ЧПУ станке материалов полностью зависят от заложенной при производстве SCARA станка прочности и жесткости «рук».
Примечания
Ссылки
1. Cartesian vs Delta vs Polar vs Scara.
2. Разновидности промышленных роботов
3. The Difference between Cartesian, Six-Axis, and SCARA Robots
4. Классификация промышленных роботов
Литература
- Орлов И.А. "Синтез движения манипуляционных систем для пространств со сложными связями и ограничениями".
- Василенко H.B., Никитин К.Д., Пономарёв В.П., Смолин А.Ю. "Основы робототехники".
- Артоболевский И.И. "Механизмы в современной технике".