Статика
Ста́тика (от греч. στατός, «неподвижный») — раздел механики, в котором изучаются условия равновесия механических систем под действием приложенных к ним сил и моментов.
Аксиомы статики
Система сил, приложенная к телу или материальной точке, называется уравновешенной или эквивалентной нулю, если тело под действием этой системы находится в состоянии покоя или движется по инерции.[1]
- Аксиома о добавлении (отбрасывании) системы двух сил, эквивалентной нулю. Не нарушая механического состояния тела, к нему можно приложить или отбросить уравновешенную систему сил.
- Аксиома о равенстве сил действия и противодействия. (Закон классической механики о действии и противодействии). При всяком действии одного тела на другое со стороны другого тела имеется равное противодействие, такое же по величине, но противоположное по направлению.
- Аксиома о равновесии системы двух сил. Две силы, приложенные к одному и тому же телу, взаимно уравновешены (их действие эквивалентно нулю) тогда и только тогда, когда они равны по величине и действуют по одной прямой в противоположные стороны.
- Аксиома параллелограмма двух сил. Равнодействующая двух сил, приложенных к одной точке, приложена к той же точке и равна диагонали параллелограмма, построенного на этих силах как сторонах.
- Аксиома затвердевания. Если деформируемое тело находилось в равновесии, то оно будет находиться в равновесии и после его превращения в абсолютно твёрдое тело (затвердевания).
- Аксиома освобождаемости от связей. Механическое состояние системы не изменится, если освободить её от связей и приложить к точкам системы силы, равные действовавшим на них силам реакций связей.
- Аксиома параллелепипеда трёх сил. Три силы, действующие в одной точке тела или на материальную точку, можно заменить одной равнодействующей силой, равной по модулю и направлению диагонали параллелепипеда, построенного на заданных силах[2].
Следствия
- При переносе силы вдоль её линии действия, действие этой силы на тело не меняется.
- Сумма всех внутренних сил равна нулю.
Основные понятия
Про тело говорят, что оно находится в равновесии, если оно покоится или движется равномерно и прямолинейно относительно выбранной инерциальной системы отсчёта[3].
В статике материальные тела считают абсолютно твёрдыми, т.к. изменение размеров тел обычно мало по сравнению с начальными размерами.
Связи
На тело влияют внешние силы, а также другие материальные тела, ограничивающие перемещение данного тела в пространстве. Такие тела называют связями. Сила, с которой связь действует на тело, ограничивая его перемещение, называется реакцией связи. Для записи условия равновесия системы связи убирают, а реакции связей заменяют на равные им силы[1].
Например, если тело закреплено на шарнире, то шарнир является связью. Реакцией связи при этом будет сила, проходящая через ось шарнира.
Системы сил
Если систему сил, действующих на твёрдое тело, можно заменить на другую систему сил, не изменяя механического состояния тела, то такие системы сил называются эквивалентными.
Для любой системы сил, приложенных к твёрдому телу, можно найти эквивалентную систему сил, состоящую из силы, приложенной в заданной точке (центре приведения), и пары сил (теорема Пуансо). Эта сила называется главным вектором системы сил, а момент, создаваемый парой сил — главным моментом относительно выбранного центра приведения. Главный вектор равен векторной сумме всех сил системы и не зависит от выбранного центра приведения. Главный момент равен сумме моментов всех сил системы относительно центра приведения.
Условие равновесия твёрдого тела
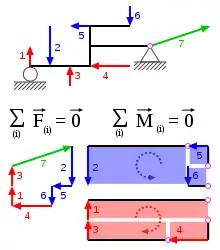
Твёрдое тело находится в равновесии, если сумма всех сил, приложенных к данному телу, и их моментов равны нулю или главный вектор и главный момент системы сил, приложенных к телу, равны нулю.[1]
Условие равновесия системы тел
Для записи условия равновесия системы, состоящей из твёрдых тел, систему разделяют на отдельные части, и записывают уравнения равновесия как для всей системы, так и для её частей[1]. При этом возможны несколько эквивалентных вариантов записи условий равновесия в зависимости от выбора частей системы, для которых записываются уравнения.
Из первого закона Ньютона следует, что если геометрическая сумма всех внешних сил, приложенных к телу, равна нулю, то тело находится в состоянии покоя или совершает равномерное прямолинейное движение. В этом случае принято говорить, что силы, приложенные к телу, уравновешивают друг друга. При вычислении равнодействующей все силы, действующие на тело, можно прикладывать к центру масс.
Чтобы невращающееся тело находилось в равновесии, необходимо, чтобы равнодействующая всех сил, приложенных к телу, была равна нулю.
Рисунок 1.14.1. Равновесие твердого тела под действием трех сил. При вычислении равнодействующей все силы приводятся к одной точке C На рис. 1.14.1 дан пример равновесия твердого тела под действием трех сил. Точка пересечения O линий действия сил и не совпадает с точкой приложения силы тяжести (центр масс C), но при равновесии эти точки обязательно находятся на одной вертикали. При вычислении равнодействующей все силы приводятся к одной точке.
Если тело может вращаться относительно некоторой оси, то для его равновесия недостаточно равенства нулю равнодействующей всех сил.
Вращающее действие силы зависит не только от её величины, но и от расстояния между линией действия силы и осью вращения.
Длина перпендикуляра, проведенного от оси вращения до линии действия силы, называется плечом силы.
Произведение модуля силы на плечо d называется моментом силы M. Положительными считаются моменты тех сил, которые стремятся повернуть тело против часовой стрелки (рис. 1.14.2).
Правило моментов: тело, имеющее неподвижную ось вращения, находится в равновесии, если алгебраическая сумма моментов всех приложенных к телу сил относительно этой оси равна нулю:*
Связь с другими науками
Статика является разделом теоретической механики.
Статика является базой для науки о сопротивлении материалов.
См. также
- Аэростатика
- Гидростатика
- Кинетостатика
- Электростатика
- Графостатика
- Относительное равновесие (Подвижное равновесие, Динамическое равновесие)
- Термодинамическое равновесие
- Химическое равновесие
Примечания
- Под редакцией Колесникова К. С. Курс теоретической механики. — Москва: Издательство МГТУ им. Н.Э. Баумана, 2005. - С. 173-176. ISBN 5-7038-1371-9
- Тарасов, 2012, с. 27.
- Под редакцией Колесникова К. С. Курс теоретической механики. — Москва: Издательство МГТУ им. Н.Э. Баумана, 2005. - С. 173-224. ISBN 5-7038-1371-9
Ссылки
- Д. Сивухин, Курс общей физики. Механика.
Литература
- Тарасов В. Н., Бояркина И. В., Коваленко М. В., Федорченко Н. П., Фисенко Н. И. Теоретическая механика. — М.: ТрансЛит, 2012. — ISBN 978-5-94976-455-8 страниц = 560.