Прибор оценки проходимости — Марс
Прибор оценки проходимости — Марс (ПрОП-М) — первый в мире марсоход. Одинаковые марсоходы ПрОП-М входили в состав автоматических марсианских станций, которые были доставлены на поверхность Марса в 1971 году спускаемыми аппаратами советских автоматических межпланетных станций «Марс-2» и «Марс-3».
Описание
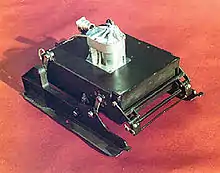
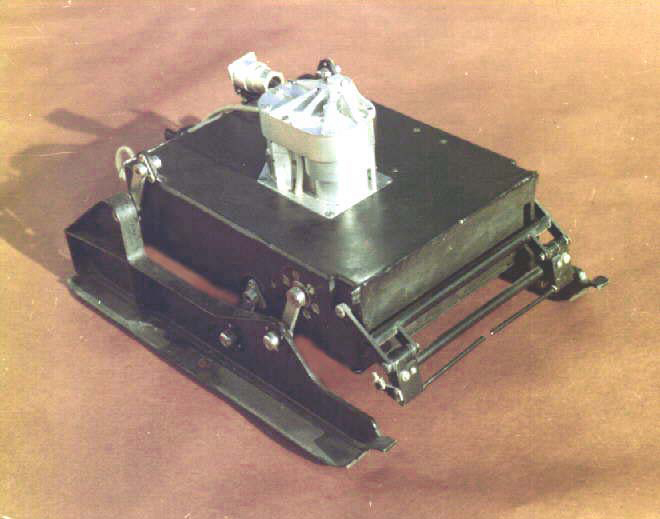
«Прибор оценки проходимости — Марс» — марсоход, подключён 15-метровым кабелем к марсианской станции. Манипулятор станции помещает марсоход на участок поверхности, снимаемый телекамерой станции. При помощи специальных датчиков он мог определять, где находится препятствие — справа или слева, и самостоятельно решать, как его лучше объехать. Над прибором на протяжении пяти лет трудились 150 человек во главе с инженером-конструктором Александром Кемурджианом. Все происходило в обстановке строгой секретности. Даже сын Кемурджиана узнал, над чем работал отец, только после того, как станция «Марс-3» отправилась в космос, унося с собой в специальной металлической «лапе» ПрОП-М.
От других запущенных планетоходов ПрОП-М отличались системой передвижения. Аппараты должны были перемещаться по грунту при помощи двух лыж, находящихся по бокам, немного приподнимающих аппарат над поверхностью. Такая система была выбрана из-за отсутствия сведений о поверхности Марса[2]. Два тонких стержня впереди являются датчиками обнаружения препятствий на пути. Подвижный аппарат мог определить, с какой стороны находится препятствие, отступить от него и попытаться обойти. Каждые 1,5 метра он делал бы остановки для подтверждения правильности курса движения. Этот элементарный искусственный интеллект был необходим для марсианских подвижных аппаратов, поскольку сигнал от Земли до Марса идёт от 4 до 20 минут, что слишком долго для подвижного устройства: к моменту прихода команд с Земли аппарат мог уже выйти из строя, столкнувшись с препятствием или опрокинувшись.
На марсоходе установлены два научных прибора — динамический пенетрометр и гамма-лучевой плотномер.[3]
- Главный конструктор — Александр Кемурджиан.
- Проектировщик и изготовитель — ВНИИТрансмаш.
Применение
- Спускаемый аппарат «Марс-2» разбился 27 ноября 1971 года при неудачной попытке мягкой посадки.
- Спускаемый аппарат «Марс-3» совершил мягкую посадку 2 декабря 1971 года, но сигнал с марсианской станции пропал через 14,5 секунды. Информация с марсохода не была получена. Станция предположительно вышла из строя из-за предельно мощной пылевой бури, которая могла вызвать коронный разряд, повредивший систему связи.
Характеристики
- Масса — 4,5 кг.
- Размеры корпуса (д×ш×в) — 25 см × 22 см × 4 см.
- Способ передвижения — шагающее шасси с датчиками обнаружения препятствий.
- Скорость передвижения — 1 метр/час. (После перемещения на 1,5 метра марсоход должен был остановиться для получения команд управления с Земли.)
- Научные приборы — динамический пенетрометр и гамма-лучевой плотномер.
- Управление — дистанционное, по кабелю от автоматической марсианской станции. Длина кабеля — 15 метров.
- Назначение — измерение плотности грунта.
Место посадки станции
Точное место посадки станции на Марсе долгое время было не известно. И только в 2013 году, 42 года после посадки, блогеры-энтузиасты во главе с любителем астрономии Виталием Егоровым из Петербурга, изучив несколько сотен фотографий марсианской поверхности, выяснили, что она покоится на дне кратера Птолемей. Там же остался и уникальный, первый в мире марсоход[4][5].
Закрытие марсианской программы
Больше ПрОП-М на Марс не запускали. Причина закрытия не известна. Вскоре СССР временно свернул всю марсианскую программу и переключился на исследования «сестры Земли» — раскалённой и окутанной ядовитым паром Венеры. В них тоже внесли огромный вклад специалисты «ВНИИтрансмаш».
Сегодня в мире осталось всего четыре ленинградских марсохода. Один хранится в НПО имени Лавочкина, другой — в «ВНИИтрансмаш». Третий можно увидеть в музее космонавтики в Петропавловской крепости — он стоит в стеклянной витрине рядом с макетом межпланетной станции «Марс-1»[6]. Четвертый же покоится на Марсе, в кратере Птолемей.
Примечания
- The Mars 3 rover (англ.). The Planetary Society. Дата обращения: 18 ноября 2020. Архивировано 19 сентября 2020 года.
- Внеземной транспорт: Планетоходы
- Гамма плотномер (Энциклопедия по машиностроению XXL).
- Поиск советских спускаемых аппаратов на Марсе.
- Нашли спустя 42 года.
- Первая колея на Луне. Выставка приурочена к юбилею конструктора планетоходов Александра Кемурджяна..
Ссылки
- YouTube: ПрОП-М, Прибор Оценки Проходимости Марс
- Фотография советского марсохода ПрОП-М
- Автоматическая марсианская станция Марс-3 на сайте NASA Архивная копия от 16 июля 2009 на Wayback Machine
- The First Rover on Mars — The Soviets Did It in 1971 (перевод на русский)
- Статья об исследовании Марса АМС
- Сообщение ТАСС о посадке автоматической станции Марс-3
{kind=link}