Наведение (военное дело)
Наведение — способ управления при котором силам (подводным лодкам, авиации) либо ракетам задаются параметры движения, выводящие их к объектам противника намеченные для поражения[1].
Наведение подводных лодок
Под наведением подводных лодок подразумевается передача информации экипажу о перемещении в район выполнения боевой задачи либо указании координат целей намеченных к поражению.
Наведение разделяется по характеру поставленных боевых задач[1]:
- для подводных лодок с торпедным вооружением — наведение в полосу движения где вероятно появление кораблей противника;
- для подводных лодок с ракетным вооружением — наведение в площадь стрельбы;
- для разведывательных подлодок — наведение в зону наблюдения.
Касательно вооружения подводных лодок термин наведение используется для процессов управления боевыми средствами (ракетами и торпедами).
Торпедное вооружение подводных лодок имеет три типа наведения[2]:
- активное самонаведение — торпеда управляется гидроакустическим локатором, которая для поиска цели посылает низкочастотные сигналы и обрабатывает отражённые сигналы
- пассивное самонаведение — торпеда управляется гидроакустическим локатором которая наводит её на цель по шуму создаваемому гребными винтами или шумом двигателей корабля противника[3]
- телеуправление — управление производится оператором по проводам либо оптическому волокну, которое разматывается из корпуса торпеды при залпе.
Наведение ракет
Наведение ракет разделяется на три типа: дистанционное (командное), автономное и самонаведение[1]

.jpg.webp)
Дистанционное наведение
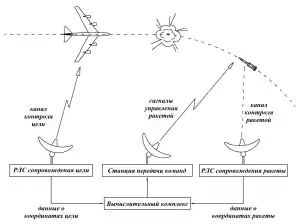
При дистанционном управлении происходит процесс непрерывного определения взаимного положения ракеты и цели и вносятся изменения в траекторию полёта ракеты по командам от оператора автоматической системы управления на командном пункте. Данный способ управления в основном применяется для противотанковых ракетных комплексов и ракет воздух-земля.
Самонаведение
Под самонаведением понимается совокупность устройств, предназначенных для автономного вывода ракеты на цель и минимизации отклонения от неё без участия экипажа летательного аппарата, расчёта ПВО или внешних средств управления. Широко применяется для зенитно-ракетных комплексов и ракет воздух-воздух.
Технически представлена в виде ракеты с головкой самонаведения (ГСН), которая перед стартом захватывает цель по её акустическому, тепловому или электромагнитному излучению. После старта ГСН управляет траекторией движения ракеты к цели.
Принцип автономного наведения
При автономном наведении ракете перед запуском на цель задаются координаты цели и программа полёта, которая управляется бортовой аппаратурой. После запуска бортовая аппаратура ведёт ракету по определённой траектории к цели.
Подобный способ наведения применяется в основном на тактических, оперативно-тактических ракетах а также на ракетных комплексах стратегического назначения — то есть в ситуациях когда дистанционное управление ракетой невозможно из-за большой продолжительности траектории ракеты и радиоэлектронного противодействия противника. Данный метод наведения также именуется инерциальным наведением, поскольку для управления ракетой используются гироскопы, позволяющие бортовым устройствам управления ракеты сохранять выбранную траекторию полёта в инерциальной системе отсчёта[4].
Принцип автономного (инерциального) наведения ракет является самым старым и в первые был использован Третьим рейхом в ракетах ФАУ-1. Система управления снарядом представляет собой автопилот, удерживающий снаряд на заданных при старте курсе и высоте в течение всего полёта. Стабилизация по курсу и тангажу осуществлялась на базе показаний 3-степенного (главного) гироскопа, которые суммировались по тангажу с показаниями барометрического датчика высоты, а по курсу и тангажу со значениями соответствующих угловых скоростей, измеряемых двумя 2-степенными гироскопами (для демпфирования колебаний снаряда вокруг собственного центра масс).
Корректирование при автономном наведении
При автономном наведении ракеты требуется дополнительное корректирование траектории, поскольку в ходе полёта ракеты могут возникнуть отклонения от заданной траектории, связанные с неточно заданными курсом и высотой при старте а также изменением метереологических условий.
Использование спутниковой системы навигации
Бортовое устройство наведения ракеты получает сигналы от спутниковой системы навигации (ГЛОНАСС, GPS), благодаря чему корректирует траекторию движения к цели.[4]
Использование оптических систем
На современных ракетных комплексах дальнего действия для корректировки траектории применяются оптические системы слежения за траекторией полёта. Техническое решение выглядит следующим образом: в головной части ракеты находится оптическая головка самонаведения в котором установлен фотоприёмник. Фотоприёмник получает изображение местности над которой пролетает ракета и отправляет данные в бортовой вычислительный комплекс в память которого заложено эталонное изображение участка местности. Вычислительное устройство распознаёт местность и корректирует дальнейшую траекторию полёта к цели[5].
Использование РЛС
Аналогично оптическому опознаванию местности, используется способ радиолокационного опознавания местности. Данный способ основан на сравнении текущего радиолокационного изображения местности по траектории движения ракеты, которое получается при сканировании местности с помощью бортовой РЛС с эталонными изображениями загруженными в бортовое вычислительное устройство. В свою очередь изображения принимаемые за эталон, получены при отработке топографических карт, цифровых карт местности, аэрофотоснимков, космических снимков. Также для создания эталонных изображений используется каталог удельных эффективных поверхностей рассеяния, характеризующих отражательные радиолокационные свойства различных поверхностей и обеспечивающих перевод оптических снимков в радиолокационные изображения местности, соответствующее текущим изображениям[5].
Наведение и целеуказание авиации


В авиации комплекс мероприятий по управлению выходом летательного аппарата на цель с последующим её поражением принято разделять на два взаимосвязанных процесса[6]:
- Целеуказание
- Наведение
Целеуказание
Целеуказание — предоставление информации экипажу о расположении и характере цели. Целеуказание подразделяется на заблаговременное и непосредственное.
При заблаговременном целеуказании экипаж получает информацию о цели при получении боевой задачи по обозначениям на топографической карте, аэрофотоснимкам полученным в ходе разведывательных мероприятий а также данным полученным от РЛС наземных либо воздушных комплексов дальнего обнаружения и наведения. РЛС ДРЛО обладают большей дальностью обнаружения чем бортовые РЛС боевых самолётов/вертолётов, поэтому задача расчётов ДРЛО заключается в наведении летательных аппаратов для их сближения с намеченной целью, до захвата последней на бортовую РЛС либо до визуального обнаружения.
При непосредственном целеуказании экипаж получает информацию о цели при подлёте самолётов/вертолётов к целям. Данное целеуказание осуществляется наземными авианаводчиками или экипажами разведывательных вертолётов/самолётов наведения и целеуказания. При нём экипажу самолёта/вертолёта доводятся данные о расположении цели относительно самолёта/вертолёта, характерного ориентира или координаты цели, тип цели, её состояние, характер функционирования, параметры движения, демаскирующие признаки на местности.
При непосредственном целеуказанием экипаж разведывательного самолёта/вертолёта либо наземный авианаводчик может производить обозначение цели с помощью различных средств: пиротехнические, огневые, светотехнические, лазерные и т. д.[6].
Наведение
Для самолёта/вертолёта под термином наведение понимается передача команд командиру авиационного подразделения либо экипажу самолёта/вертолёта для вывода его в положение, обеспечивающее экипажам обнаружение цели визуально либо по приборам (на бортовую РЛС, тепловизоры и т. д.) и её атаки с ходу.
Наведение самолёта/вертолёта является процессом более сложным чем целеуказание. Расчёт наведения летательного аппарата производится с учётом его маневренных возможностей а также огневых возможностей средств ПВО противника. Производящий наведение должен просчитать курс захода летательного аппарата на цель с высотой, углом атаки и скоростью которая позволит наиболее эффективно поразить цель и уйти от огня ПВО противника[6].
Передовое авиационное наведение
Заключительный этап наведения и непосредственного целеуказания, в котором экипажи самолётов/вертолётов получают информацию от лица находящегося в условиях соприкосновения с противником (на передовой), называется передовым авиационным наведением (передовое авианаведение), сокращённо ПАН[7].
Лицо осуществляющее на передовой разведку целей, наведение и целеуказание называется передовым авианаводчиком[8][9][10].
Передовое авиационное наведение по воздушным, наземным и надводным целям может производиться как с земли (поверхности воды) так и с летательного аппарата.
Примечания
- Военный энциклопедический словарь (ВЭС),М.,ВИ,1984 г., страница 468
- Развитие подводных лодок и тенденции увеличения полезной нагрузки. С.Мудряков. Зарубежное военное обозрение. № 9 2015 год. 83-88стр.
- Пассивные самонаводящиеся торпеды 1943—1945 гг. Юрий Лохматов
- Cruise missile guidance techniques.Dr Carlo Kopp (Методы навигации крылатых ракет)
- Головки самонаведения на отечественных дальнобойных ракетах «земля-земля»
- Теория и методика управления авиацией. Учебное пособие военной кафедры. Ульяновск. УВАУ ГА. 2006 год. 190стр.
- ОА-10. Передовой авианаводчик Архивная копия от 5 марта 2016 на Wayback Machine // Журнал «Мировая Авиация», выпуск 38, лист 04
- «Слышу, вижу, управляю» // «Красная звезда», 12 Августа 2009
- Вызывающий бурю. Почему авианаводчиков не берут в плен // РИА, янв 2019
- Авианаводчик. Подготовка и роль в составе пехотного подразделения (группы СпН)