Апериодическое звено
Апериодическое звено — понятие, относящееся к теории автоматического управления. Типовое динамическое звено.
Апериодическое звено первого порядка
Апериодическое звено первого порядка — одноемкостное, инерционное звено, которое можно описать дифференциальным уравнением:
- .

К стандартному виду приводится делением на правой и левой части уравнения:

- ,

где:
- — выходная величина;
- — входная величина;
- — коэффициент усиления звена;
- — постоянная времени, характеризующая инерционность звена. Чем больше постоянная времени звена, тем дольше длится переходный процесс.






Передаточная функция
Передаточная функция апериодического звена 1-го порядка получается путём применения к дифференциальному уравнению свойства дифференцирования оригинала преобразования Лапласа:
- ,

- .


Комплексная передаточная функция получается при подставлении вместо комплексной переменой .


Чтобы разделить на мнимую и действительную часть необходимо домножить числитель и знаменатель на комплексно-сопряженное число :




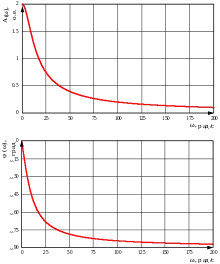
АФЧХ
Амплитудная и фазовая частотные характеристики для заданной передаточной функции:

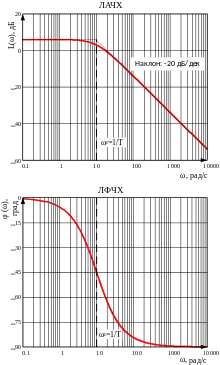
ЛАФЧХ
Логарифмические амплитудная и фазовая частотные характеристики для заданной выше передаточной функции.
Из амплитудной характеристики видно, что колебания частот проходят через апериодическое звено 1-го порядка с отношением выходной и входной амплитуд близким к коэффициенту передачи звена . Колебания частот проходят со значительным уменьшением амплитуды, следовательно «плохо пропускаются» звеном. Чем меньше постоянная времени , а следовательно, чем меньше инерционность звена, тем более растянута амплитудная характеристика вдоль оси частот и больше полоса пропускания частот данного звена. Аналогично, в случае фазовой характеристики, чем меньше постоянная времени , тем более растянута фазовая характеристика вдоль оси частот и меньше фазовые сдвиги между выходными и входными колебаниями. Угол отставания с увеличением частоты растет, а амплитуда колебаний на выходе падает. Предельный угол отставания равен -π/2.




После подачи на вход возмущающего воздействия отклонение выходной величины будет изменяться по экспоненте с максимальной скоростью в начальный момент. Затем скорость уменьшается до нуля, а выходная величина достигает нового установившегося значения.[1]
В системах автоматического управления в качестве апериодического звена могут выступать двигатели постоянного тока, сопротивления и индуктивности, нагревательная камера, гидравлическая система с дросселем на выходе и др.
В целом считается, что почти любой объект управления в первом приближении, очень грубо, можно описать апериодическим звеном 1-го порядка.[2]
Апериодическое звено второго порядка
Уравнение апериодического звена 2-го порядка имеет вид
,

Передаточная функция апериодического звена 2-го порядка:

Два последовательно соединенных апериодических звена 1-го порядка, могут быть представлены как апериодическое звено 2-го порядка с общим коэффициентом усиления.
Примеры применения
Одним из примеров апериодического звена первого порядка является RL – цепь, где входной величиной является напряжение U1, поступающее на цепь, а в качестве выходной величины может рассматриваться ток или напряжение U2 на сопротивлении R .В первом случае коэффициент передачи k = 1 / R, а во втором k = 1 Постоянная времени звена T = L / R.
Примечания
- А.В. Андрюшин, В.Р.Сабанин, Н.И.Смирнов. Управление и инноватика в теплоэнергетике. — М: МЭИ, 2011. — С. 80. — 392 с. — ISBN 978-5-38300539-2.
- Словарь по кибернетике /Под редакцией В. С. Михалевича. — 2-е издание — К.: 1989. — 751 с., ISBN 5-88500-008-5
См. также
Литература
- Бесекерский В.А., Попов Е.П. 4-е изд // Теория систем автоматического управления. — СПб.: Профессия, 2003. — 752 с. — ISBN 5-93913-035-6.
- Ким Д.П. 2-е изд // Теория автоматического управления. Т. 1. Линейные системы. — М.: ФИЗМАТЛИТ, 2007. — 312 с. — ISBN 978-5-9221-0857-7.