Уровнемер
Уровнемер — прибор, предназначенный для определения уровня содержимого в открытых и закрытых сосудах, резервуарах, хранилищах и других ёмкостях. Под содержимым подразумеваются разнообразные виды жидкостей, в том числе и газообразующие, а также сыпучие и другие материалы. Уровнемеры также называют датчиками/сигнализаторами уровня, преобразователями уровня. Главное отличие уровнемера от сигнализатора уровня — возможность непрерывного измерения уровня (градаций уровня), а не только его граничные значений в точках.
В промышленном производстве в настоящее время существует разнообразный ряд технических средств, решающих задачу измерения и контроля уровня. Средства измерения уровня реализуют разнообразные методы, основанные на различных физических принципах. К наиболее распространённым методам измерения уровня, которые позволяют преобразовать значение уровня в электрическую величину и передавать её значение в системы АСУ ТП, относятся:

- контактные методы:
- волноводный,
- магнитострикционный
- емкостной,
- гидростатический,
- буйковый(поплавковый)
- бесконтактные методы:
- зондирование звуком,
- зондирование электромагнитным излучением,
- зондирование радиационным излучением.
С развитием измерительной техники каждый метод приобретает характерный набор своих технических реализаций, которые в каждом конкретном случае имеют как преимущества, так и недостатки.
Применимость того или иного средства измерения уровня определяется требуемой точностью и требованиями конкретного процесса - условиями внутри контролируемого резервуара спецификой измерительной задачи (давление и температура процесса, изменяемая плотность среды, агрессивность среды, возможность налипания, загустевания и т.п.). На объектах повышенной пожарной опасности уровнемеры должны обладать характеристиками, обеспечивающими нормальную эксплуатацию оборудования в местах, в которых существует опасность взрыва газа или пыли - соответствующий уровень взрывозащиты. Некоторые уровнемеры должны иметь встроенные средства самодиагностики, проверки программного обеспечения и защиты от изменения настроек - как правило для коммерческого учета или обеспечивающие безопасность процесса.
Бесконтактный (радарный) уровнемер
Непрерывное измерение уровня по радарному принципу основано на теории распространения электромагнитных волн британского физика Джеймса Максвелла, созданной им в 1865 году. Он предположил, что силовые линии меняющегося магнитного поля окружены кругообразными силовыми линиями электрического поля, даже при отсутствии электрических проводников. Вдохновлённый этой теорией, немецкий физик Кристиан Хюльсмайер в 1904 году в Дюссельдорфе разработал телемобилоскоп и запатентовал этот первый радарный прибор. Благодаря этому устройству он стал известен как изобретатель первого радара.
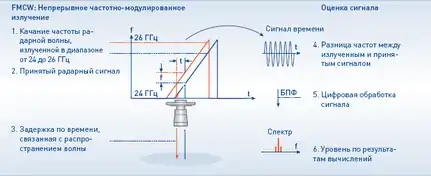
Принцип измерения

Излучаемый сигнал отражается от поверхности измеряемой среды и с небольшой временной задержкой t принимается антенной. Используемый радарный принцип называется FMCW (непрерывное частотно-модулированное излучение). При радарном FMCW измерении используется высокочастотный сигнал, частота излучения которого во время измерения линейно возрастает (так называемое качание частоты). Излучаемый сигнал отражается от поверхности измеряемой среды и принимается с небольшой временной задержкой t. Время задержки рассчитывается по формуле t=2d/c, где d - это дистанция до поверхности продукта, а c - это скорость света в газе над поверхностью среды. На основании частоты посланных и принятых сигналов рассчитывается разница Δf, используемая при дальнейшей обработке сигнала. Разница частот прямо пропорциональна дистанции. Большая разница между частотами соответствует большей дистанции, и наоборот. Разница частот Δf трансформируется в частотный спектр с помощью дискретного преобразования Фурье (ДПФ), на основании которого затем рассчитывается дистанция. Уровень рассчитывается как разница между высотой резервуара и полученной дистанцией.
Ультразвуковой уровнемер
Ультразвуковые уровнемеры используются для непрерывного измерения уровня жидкостей и сыпучих веществ практически во всех отраслях промышленности.
Принцип измерения

Короткие ультразвуковые импульсы в диапазоне от 18 до 70 кГц излучаются сенсором в направлении измеряемой среды, отражаются от её поверхности и снова улавливаются сенсором. Импульсы распространяются со скоростью звука, при этом время между моментом излучения и приёма сигнала зависит от уровня заполнения резервуара. Новейшая микропроцессорная технология и зарекомендовавшее себя программное обеспечение гарантируют надёжное обнаружение эхо-сигнала уровня даже при наличии ложных эхо-сигналов, отражённых от внутренних конструкций, и высокоточное вычисление дистанции до поверхности измеряемой среды. Чтобы компенсировать влияние времени прохождения акустического сигнала, встроенный температурный датчик определяет температуру в резервуаре.
Благодаря простому вводу габаритных размеров ёмкости и измеренной дистанции рассчитывается сигнал, пропорциональный уровню. Таким образом, отсутствует необходимость в заполнении ёмкости для выполнения точной настройки.
Метод непрерывного ультразвукового измерения уровня доказал свою эффективность. Ультразвуковые уровнемеры подходят для измерения дождевой и сточной воды, для жидкостей с низким или высоким уровнем загрязнения, с содержанием твёрдых частиц или шлама. Само собой разумеется, что при работе с сыпучими веществами к измерительному прибору предъявляются другие требования, чем при работе с жидкостями. Ведь поверхность измеряемого продукта при этом неровная и часто представляет собой насыпной конус. Многие вещества вызывают интенсивное образование пыли. Кроме того, многие резервуары для сыпучих веществ намного выше, чем ёмкости для жидкостей.

Рефлекс-радарный уровнемер
Принцип измерения
Принцип измерения рефлекс-радарного TDR уровнемера основан на технологии рефлектометрии во временно области (TDR - "Time Domain Reflectometry"). Часто такие приборы также называют уровнемерами с направленной волной, контактного типа (GWR - "guided wave radar"). При данном способе измерений электромагнитные импульсы малой мощности и длительностью около 1 наносекунды распространяются по волноводу (чаще всего стержень или несколько стержней, трос, коаксиальная конструкция). Импульсы движутся со скоростью, определяемой характеристиками среды распространения, геометрией волновода - как конструкции распространения электромагнитного излучения. В случае распространения в воздухе при нормальных условиях скорость распространения считают равной скорости света. Скорость распространения обратно-пропорциональна квадратному корню из диэлектрической проницаемости среды распространения [1]. В случае распространения импульсов через слой среды, диэлектрическая проницаемость которой близка к 2 (почты все нефтепродукты), скорость распространения снизится в 1.414 раз. Достигнув поверхности контролируемого продукта, импульсы отражаются от границы раздела сред, а интенсивность отражения также зависит от диэлектрической постоянной продукта εr (например, от поверхности воды отражается до 80% от уровня первоначального импульса, для светлых нефтепродуктов - около 17%). Прибор измеряет временной интервал между моментами излучения и отражения импульсов. Половина этого времени соответствует расстоянию между точкой начала отсчёта (часто принимают за начало отсчета уплотнительную поверхность фланца) и поверхностью измеряемой среды. Это временное значение преобразуется в выходной сигнал требуемого типа, например 4...20 мА и/или дискретные сигналы, либо сохраняется в доступном для считывания/доступа виде с использованием цифрововых интерфейсов/протоколов (например RS-485, Modbus RTU, HART и т.п.). Особенностью приборов данного типа является возможность измерения межфазного уровня одновременно с измерением уровня основного продукта, без применения движущихся частей. Отдельные приборы такого типа удобно объединяют в себе измерение уровня и температуры продукта. Пыль, пена, испарения, неспокойная поверхность, кипящие жидкости, колебания давления и температуры, плотности практически не влияют на работу прибора.
Поплавковый уровнемер
Принцип измерения

Магнитный байпасный индикатор уровня функционирует по принципу сообщающихся сосудов. Измерительная камера устанавливается вплотную к ёмкости таким образом, чтобы условия в измерительной камере и в ёмкости были одинаковыми. Поплавок оснащён cистемой постоянных магнитов, предназначенных для передачи измеренных значений на локальный индикатор. Система магнитов поплавка либо активирует магнитные пластины (флажковый индикатор) в соответствии с уровнем жидкости, либо перемещает магнитный указатель в индикаторе в зависимости от выбранного способа индикации. Индикация уровня осуществляется посредством изменения положения группы вертикально расположенных магнитных флажков или исходя из положения магнитного указателя.
Буйковый уровнемер
Принцип измерения
Индикатор уровня работает по принципу вытеснения. Согласно этому принципу длина тела, погружённого в жидкость, соответствует диапазону измерения уровня. Подвешенный на измерительной пружине стержень-вытеснитель погружён в жидкость, и на него в соответствии с законом Архимеда воздействует выталкивающая сила, пропорциональная массе вытесненной телом жидкости. Изменению выталкивающей силы точно соответствует изменение длины пружины, что позволяет измерить уровень. Изменение длины пружины преобразуется при помощи магнитной системы в изменение уровня и передаётся на индикатор.

Расчетная схема
Буек закреплен на упругой подвеске с жесткостью с, действующей на буек с определенным усилием. Увеличивая уровень на Н от нулевого положения 00, увеличиваем выталкивающую силу, что вызывает подъём буйка на х, причём при его подъёме увеличивается осадка, т.е. х < h. При этом изменяется усилие, с которым подвеска действует на буек, причём изменение равно изменению выталкивающей силы, вызванной увеличением осадки буйка на (h - х): хс = (h — х)ρ жgF - (h- х)ρ гgF, где с — жесткость подвески; ρ ж, ρ г — плотность жидкости и газа; F— площадь поперечного сечения буйка. Отсюда легко получить выражение для статической характеристики буйкового уровнемера: x = h/(1 + с(ρ ж - ρ г)gF). Таким образом, статическая характеристика буйкового уровнемера линейна, причём чувствительность его может быть изменена за счет увеличения F или уменьшения жесткости подвески с. При большой жесткости подвески буек перемещаться не будет, однако при изменении уровня изменится усилие, с которым он действует на подвеску. В этом случае при увеличении уровня на h изменение усилия равно hF(ρ ж - ρ г)g. Такой принцип используется, например, в буйковых уровнемерах типов Сапфир-22ДУ, УБ-Э, ПИУП (ранее УБ-П). Последние уровнемеры снабжены преобразователями с силовой компенсацией (УБ-Э) с унифицированным токовым выходным сигналом, УБ-П и ПИУП с унифицированным пневматическим выходным сигналом).
Гидростатический уровнемер
Основным принципом действия данных уровнемеров является измерение гидростатического давления, оказываемого жидкостью. Существует три основных типа гидростатических уровнемеров – погружные, врезные и фланцевые, выделяемые по типу присоединения к процессу. Так же, так как этот фактор обуславливает специальные требования к материалам, из которых изготовлен прибор, имеет смысл выделять гидростатические уровнемеры по типу измеряемых сред: неагрессивная к нержавеющей стали, агрессивная к нержавеющей стали, пульпообразная, густая и абразивная среды. При выборе метода измерения уровня, следует учитывать, что корректные измерения гидростатическими датчиками возможны только в средах с постоянной плотностью, так как гидростатическое давление зависит от плотности жидкости и величины уровня. При необходимости решения задачи измерения уровня в средах с меняющейся плотностью, возможна установка двух датчиков уровня. Один прибор устанавливается в емкость для отбора пробы. В емкости обеспечивается постоянный уровень и уровнемер измеряет плотность, а данные со второго (собственно уровнемера) пересчитываются в контроллере с учетом текущей плотности среды, с которого уже скорректированный сигнал поступает в верхний уровень.
Достоинства:
- простота монтажа и обслуживания;
- высокая надежность;
- гидростатические уровнемеры отлично работают с вязкими жидкостями и при большом избыточном давлении.
- точность;
- реализация метода не предполагает использования подвижных механизмов;
Недостатки:
- движение жидкости вызывает изменение давления и приводит к ошибкам измерения (давление относительно плоскости отсчёта зависит от скорости потока жидкости — следствие закона Беррнулли);
- атмосферное давление должно быть скомпенсировано;
- изменение плотности жидкости может быть причиной ошибки измерения.
- чувствительный элемент находится в непосредственном контакте с измеряемой средой, что требует для датчиков специальных материалов, существенно сужая область их использования.
Примечания
- Zhukov, Yu., Gordeev, B., Zivenko, A., Nakonechniy A. [https://books.google.com.ua/books?hl=ru&lr=&id=M21CCQAAQBAJ&oi=fnd&pg=PA211&ots=YahNzdvI3d&sig=rdOjSprY2BGct_1KLzcylvEKIhc&redir_esc=y#v=onepage&q&f=false Polymetric Sensing in Intelligent Systems. Chapter in the book Advances in Intelligent Robotics and Collaborative Automa tion] / Yuriy P. Kondratenko, Richard J. Duro. — River Publishers, 2015. — С. 211-232. — ISBN 978-87-93237-03-2.