Кибернож
Кибернож (англ. CyberKnife) — радиохирургическая система производства компании Accuray, предназначенная для лечения доброкачественных и злокачественных опухолей и других заболеваний[1][2]. Разработана в 1992 году профессором нейрохирургии и радиационной онкологии Стенфордского университета (США) Джоном Адлером и Питером и Расселом Шонбергами из Schonberg Research Corporation. Изготавливается компанией Accuray, штаб-квартира которой находится в г. Саннивейл, штат Калифорния.
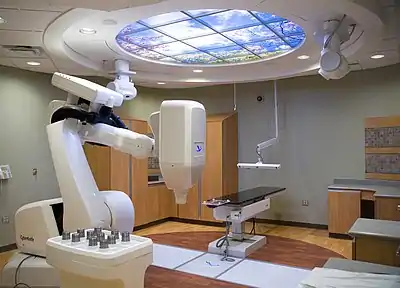
Метод воздействия системы основан на лучевой терапии с целью более точного воздействия, чем при обычной лучевой терапии[3]. Два основных элемента системы: (1) небольшой линейный ускоритель, создающий излучение, и (2) роботехническое устройство, позволяющее направлять энергию на любую часть тела с любого направления.
По заявлению производителя, в настоящее время в мире установлено около 250 установок киберножа, более 100 000 пациентов получили лечение. Большинство из этих установок находится в клиниках США, на втором месте — Япония. В меньшей степени — в странах Европы и Азии.
Основные характеристики
Источник излучения установлен на промышленном многоцелевом роботе. На оригинальной установке CyberKnife использовался японский робот производства компании Fanuc, на более современных системах используется робот производства немецкой компании KUKA KR 240. На роботе установлен портативный линейный ускоритель с полосой излучения в рентгеновском диапазоне, который может облучать объект с показателем 600 cGy в минуту. Американское общество лучевой онкологии (ASTRO) объявило о появлении модели с показателем излучения в 800 cGy в минуту[4]. Излучение коллимируется посредством вольфрамовых коллиматоров (также называемых конусами), создающих круговые поля излучения. В настоящее время применяются поля излучения шириной в 5; 7,5; 10; 12,5; 15; 20; 25; 30; 35; 40; 50 и 60 мм. ASTRO 2007 также увидело применение коллиматора с изменяемой апертурой IRIS[4], в котором используется два набора из шести призматических вольфрамовых сегментов для формирования размытого устойчивого поля в виде двенадцатиугольника, что снимает необходимость настройки для фиксации коллиматоров. Монтаж источника излучения на роботе позволяет получить почти полную свободу в положении источника в пространстве близ пациента и моментальное перемещение источника, что позволяет облучать с самых различных направлений без необходимости перемещения как пациента, так и источника, которая возникает при использовании современных конструкций.
Управление изображением
Система CyberKnife использует систему управления изображением. Камеры рентгеновского изображения располагаются вокруг пациента, благодаря чему получаются мгновенные рентгеновские изображения.
Первоначальный метод (который всё ещё используется) — метод отслеживания положения черепа. Изображения рентгеновской камеры сравниваются с библиотекой анатомических изображений пациента, сгенерированных компьютером. Радиоизображения, реконструированные цифровым способом (DRR), передаются в компьютерный алгоритм, который определяет, какие изменения движения робота необходимы в связи с движениями пациента. Система изображений позволяет киберножу излучать с точностью до 0,5 мм без использования механических зажимов, прикрепляемых к голове пациента[5]. Изображения строят с помощью бескаркасной стереотаксической радиохирургии. Этот метод считается 6-мерным (6-D), поскольку коррекции производятся вращательными и поступательными движениями в трёх направлениях (X, Y и Z). Следует отметить, что необходимо использовать некоторые анатомические и искусственные особенности для ориентации робота при излучении рентгеновского излучения, поскольку опухоль никак не может быть в достаточной степени определена (если она полностью видима) на изображениях рентгеновской камеры.
Для работы с опухолями спины и лёгких доступны дополнительные методы контроля изображений. Для опухолей спины используется вариант, называемый Xsight-Spine[6]. Вместо сбора изображений черепа при этом методе используются изображения позвоночника. В то время как череп имеет жёсткую неизменяемую структуру, позвонки могут двигаться относительно друг друга, поэтому необходимо применять алгоритмы искривления изображения для коррекции искажений изображений рентгеновской камеры.
Недавно было разработано Xsight-Lung[7] — усовершенствование метода Xsight, позволяющее отслеживать положение некоторых лёгочных опухолей без имплантации сравнительных маркеров[8].
Для некоторых опухолей мягких тканей может быть использован метод отслеживания сравнительного положения[9]. Небольшие металлические маркеры изготавливаются из золота (для биологической совместимости) высокой плотности для получения хорошего контраста рентгеновских изображений и имплантируются в пациента хирургическим путём. Процедуру производит интервенционный радиолог или нейрохирург. Размещение маркеров — критически важный шаг при проведении обследования. Если они окажутся слишком далеко от местоположения опухоли или не будут достаточно рассеяны друг относительно друга, станет невозможным точно распределить облучение. Как только маркеры размещаются на местах, они отображаются на сканере CT, система контроля изображения программируется в соответствии с их позицией. После получения изображений рентгеновской камерой определяется положение опухоли относительно маркеров и осуществляется облучение соответствующей части человеческого тела. Таким образом, метод сравнительного отслеживания не требует информации об анатомии скелета для позиционирования облучения. Тем не менее известно, что маркеры могут мигрировать, что ограничивает точность лечения, если оно не могло быть проведено в надлежащее время между моментом имплантации и лечением для стабилизации маркеров[10][11].
Система Кибернож также может использовать метод синхронизации. В этом методе используется комбинация имплантируемых фидуциарных маркеров (обычно — небольших маркеров из золота, хорошо видимых на рентгеновских изображениях) и светоизлучающих оптических волокон (LED-маркеров), устанавливаемых на коже пациента. Их положение также отмечается следящей инфракрасной камерой. Поскольку опухоль постоянно движется, рентгеновские камеры, необходимые для получения постоянного изображения, требуют слишком большого уровня излучения, попадающего на кожу пациента. Система синхронизации решает эту проблему, периодически получая изображение внутренних маркеров и вычисляя модель связи между движением внешних LED-маркеров и внутренних маркеров. Метод получил такое название, поскольку для синхронизации двух потоков данных необходимы временные отметки с двух датчиков (рентгеновских инфракрасных LED).
Для предотвращения скрытых перемещений робота и изменений изображения используется прогнозирование движения. Перед началом лечения компьютерный алгоритм создаёт модель корреляции, отвечающую на вопрос о взаимосвязи движения внутренних маркеров в сравнении с движением внешних маркеров. В ходе лечения система периодически отмечает положение внутренних маркеров и соответствующее положение опухоли на основе движения накожных маркеров. Во время лечения корреляционная модель обновляется с постоянным шагом по времени. Таким образом, при методе отслеживания синхронизации не делаются предположения о регулярности или воспроизводимости характера дыхания пациента.
Для правильной работы системы синхронизации необходимо, чтобы для любой корреляционной модели существовала функциональная зависимость между маркерами и внутренними фидуциарными маркерами. Размещение внешнего маркера также важно, маркеры обычно размещаются в животе пациента, благодаря чему их движение отражает внутреннее движение диафрагмы и лёгких. Метод синхронизации был изобретён в 1998[12][13]. Первые пациенты прошли лечение в больнице Кливленда в 2002. Этот метод используется главным образом при онкологических заболеваниях лёгких и поджелудочной железы[14][15].
RoboCouch
Для изменения позиции пациентов при лечении используется робототехническое ложе с шестью степенями свободы, называемое RoboCouch[16].
Безрамная основа
Безрамная основа системы CyberKnife также повышает клиническую эффективность. В традиционной, основанной на применении рамы радиохирургии точность вмешательства зависит только от соединения жёсткой рамы с пациентом. Рама прикрепляется к черепу пациента инвазивным алюминиевыми или титановыми шурупами. Система CyberKnife — единственное радиохирургическое устройство, не требующее рамы для точного определения цели[17]. После установления рамы относительные позиции человеческой анатомии могут определяться сканерами CT или МРТ. После сканирования врач может спланировать облучение, используя выделенную компьютерную программу, и рама убирается. Таким образом, использование рамы требует выполнения линейной последовательности событий, прежде чем можно будет лечить следующего пациента. Поэтапная радиохирургия посредством системы CyberKnife даёт особенную выгоду пациентам, которые до этого получали большие дозы обычной радиотерапии, и пациентам, имеющим глиомы близ критических областей мозга. В отличие от радиотерапии всего мозга, которая может проводиться ежедневно в течение нескольких недель, радиохирургия обычно может быть выполнена за 1-5 лечебных сеанса. Радиохирургия может применяться в одиночку для лечения опухолей мозга или в совокупности с хирургией или радиотерапией всего мозга, что зависит от специфических клинических обстоятельств[18].
In iterative optimization, simplex optimization, or Sequential Optimization, the solution set can consist of the sum of the number of isocentrically targeted beams and non-isocentrically targeted beams. Therefore, the maximum number of potential beams in a single treatment plan is 10,256 beams, if 32 isocenters are targeted and 12 collimators are used to generate a treatment plan using Sequential Optimization.
— CK's Physics Essential Guide
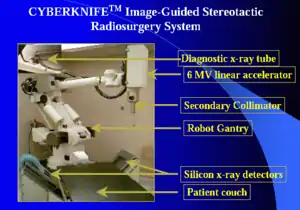
Другой особенностью этой системы является наличие ряда трекинговых систем, которые отслеживают расположение опухоли в пространстве, в том числе в режиме реального времени. Это позволяет автоматически подстраивать наведение пучка во время сеанса лечения, что обеспечивает высокую (субмиллиметровую) точность не только позиционирования ускорителя, но и самого облучения без жёсткой фиксации пациента, то есть без стереотаксической рамки, которая крепится к черепу пациента, например, при лечении «Гамма-ножом». Слежение обеспечивается двумя парами «рентгеновская трубка — детектор на аморфном кремнии», изображения с которых поступают в компьютер, который обрабатывает их и создаёт стереоскопическое изображение. Ориентирами для этой системы служат костные структуры пациента, рентгеноконтрастные метки и в случае достаточного контраста — сама опухоль. При радиохирургическом лечении области лёгких во время дыхания происходит смещение опухоли в пространстве. Комплекс трекинговых систем Киберножа позволяет проводить точное лечение, не ограничивая дыхание пациента, моделируя позицию терапевтической мишени по положению ИК-датчиков на теле пациента (то есть по дыхательной экскурсии). Высокая точность позиционирования пучка ионизирующего излучения позволяет применять в лечении пациента намного большие дозы излучения за сеанс, что позволяет сократить курс лечения от нескольких недель до одного-пяти дней[19][20].
Клиническое применение
С августа 2001 Управление по санитарному надзору (США) разрешило использовать систему CyberKnife для лечения опухолей в любых частях человеческого тела[21]. Система используется для лечения опухолей поджелудочной железы[15][22], печени[23] , простаты[24][25], позвоночника[26], рака горла и мозга[27] и доброкачественных опухолей[28].
Ни одно исследование не выявило какого-либо превышения показателя выживания при использования системы по сравнению с другими методами. С увеличением точности облучения растёт возможность увеличения дозы и возможно последующее увеличение эффективности, особенно в местных коэффициентах. При этом объёмы исследований были ограничены, и необходимы более обширные исследования для определения изменения показателя выживания[22].
Сейчас Кибернож применяется для лечения злокачественных опухолей в медицинских учреждениях разных стран:
- Университетский госпиталь Medipol (Турция);
- Медицинский центр Anadolu (Tурция);
- Медицинский центр им. Сураски (Ихилов, Израиль);
- BLK клиника доктора Капура (Индия);
- Клиника Memorial Hospital Istanbul, Şişli (Турция);
- Клиника Charite (Германия);
- Asan Medical Center (Южная Корея);
- Severance Hospital (Южная Корея);
- Quiron Madrid Hospital (Испания);
- Сеть клиник Medicana (Турция);
- Госпиталь Аполло Индрапрастха (Apollo Hospitals Group, Индия);
- Istituto Europeo di Oncologia (Италия);
- Клиника Medanta (Индия);
- Клиника Хирсланден (Швейцария).
В 2008 году на установке CyberKnife проходил лечение актёр Патрик Суэйзи[29].
Кибернож в России
Первый Кибернож в государственной клинике был открыт НИИ Нейрохирургии имени Бурденко в 2009г. Через 2 года - в Челябинске в 2011 году[30][31].
В 2012 году введён в эксплуатацию радиохирургический комплекс Cyberknife VSI в ООО «Межрегиональный медицинский центр ранней диагностики и лечения онкологических заболеваний» в Воронеже[32].
На начало 2018 года на территории России работает несколько установок Кибернож. Например радиохирургический комплекс CyberKnife G4, работающий в Онкологической клинике МИБС в Санкт-Петербурге[33].
Стоимость аппарата в России по системе государственных закупок в 2012 году составляла около 295 млн рублей[34].
См. также
Примечания
- Radiosurgery/Cyberknife. Stanford School of Medicine
- Coste-Manière, E. et al. (1 March 2005) "Robotic Whole Body Stereotactic Radiosurgery: Clinical Advantages of the CyberKnife® Integrated System". Robotics Online.
- Plowman, Nick. How CyberKnife Works. London HCA
- Accuray Announces Four New Products at Nation’s Leading Radiation Oncology Meeting. accuray.com. 29 October 2007
- Inoue M., Sato K., Koike I. 2722 // International Journal of Radiation Oncology*Biology*Physics. — 2006. — Ноябрь (т. 66, № 3). — С. S611. — ISSN 0360-3016. — doi:10.1016/j.ijrobp.2006.07.1138.
- Xsight Spine Tracking System. Accuray
- Xsight Lung Tracking System. Accuray
- Schweikard A., Shiomi H., Adler J. Respiration tracking in radiosurgery without fiducials. (англ.) // The international journal of medical robotics + computer assisted surgery : MRCAS. — 2005. — Vol. 1, no. 2. — P. 19—27. — doi:10.1002/rcs.38. — PMID 17518375.
- CyberKnife Radiosurgery – Fiducial Overview. sdcyberknife.com
- Fuller CD; Scarbrough T. J. Fiducial Markers in Image-guided Radiotherapy of the Prostate (англ.) // US Oncological Disease : journal. — 2006. — Vol. 1, no. 2. — P. 75—9. Архивировано 2 апреля 2015 года.
- Murphy Martin J. Fiducial-based targeting accuracy for external-beam radiotherapy // Medical Physics. — 2002. — 20 февраля (т. 29, № 3). — С. 334—344. — ISSN 0094-2405. — doi:10.1118/1.1448823.
- Schweikard A., Glosser G., Bodduluri M., Murphy M. J., Adler J. R. Robotic motion compensation for respiratory movement during radiosurgery. (англ.) // Computer aided surgery : official journal of the International Society for Computer Aided Surgery. — 2000. — Vol. 5, no. 4. — P. 263—277. — doi:10.1002/1097-0150(2000)5:4<263::AID-IGS5>3.0.CO;2-2. — PMID 11029159.
- Schweikard A., Shiomi H., Adler J. Respiration tracking in radiosurgery. (англ.) // Medical physics. — 2004. — Vol. 31, no. 10. — P. 2738—2741. — PMID 15543778.
- Muacevic, Alexander et al. (9 December 2009) "Single-Session Lung Radiosurgery Using Robotic Image-Guided Real-Time Respiratory Tumor Tracking". Cureus.
- Koong A. C., Le Q. T., Ho A., Fong B., Fisher G., Cho C., Ford J., Poen J., Gibbs I. C., Mehta V. K., Kee S., Trueblood W., Yang G., Bastidas J. A. Phase I study of stereotactic radiosurgery in patients with locally advanced pancreatic cancer. (англ.) // International journal of radiation oncology, biology, physics. — 2004. — Vol. 58, no. 4. — P. 1017—1021. — doi:10.1016/j.ijrobp.2003.11.004. — PMID 15001240.
- RoboCouch Patient Positioning System. Accuray
- "Rocky Mountain CyberKnife Center – Brain Metastases" Архивная копия от 12 апреля 2009 на Wayback Machine. rockymountainck.com.
- Chang S. D., Main W., Martin D. P., Gibbs I. C., Heilbrun M. P. An analysis of the accuracy of the CyberKnife: a robotic frameless stereotactic radiosurgical system. (англ.) // Neurosurgery. — 2003. — Vol. 52, no. 1. — P. 140—146. — PMID 12493111.
- Андрей Гришковец. Работа скальпеля да Винчи. Forbes. forbes.ru (28 июля 2010). Дата обращения: 26 марта 2013. Архивировано 5 апреля 2013 года.
- Schweikard, A., Glosser, G., Bodduluri, M., Murphy, M. J., & Adler, J. R. (2000). Robotic motion compensation for respiratory movement during radiosurgery. Computer Aided Surgery, 5(4), 263—277
- «Reimbursement Information» Архивная копия от 27 октября 2010 на Wayback Machine. CyberKnife. Web. 10 March 2010.
- Koong A. C., Christofferson E., Le Q. T., Goodman K. A., Ho A., Kuo T., Ford J. M., Fisher G. A., Greco R., Norton J., Yang G. P. Phase II study to assess the efficacy of conventionally fractionated radiotherapy followed by a stereotactic radiosurgery boost in patients with locally advanced pancreatic cancer. (англ.) // International journal of radiation oncology, biology, physics. — 2005. — Vol. 63, no. 2. — P. 320—323. — doi:10.1016/j.ijrobp.2005.07.002. — PMID 16168826.
- Lieskovsky Y.C., Koong A., Fisher G., Yang G., Ho A., Nguyen M., Gibbs I., Goodman K. Phase I Dose Escalation Study of CyberKnife Stereotactic Radiosurgery for Liver Malignancies // International Journal of Radiation Oncology*Biology*Physics. — 2005. — Октябрь (т. 63). — С. S283. — ISSN 0360-3016. — doi:10.1016/j.ijrobp.2005.07.483.
- Hara W., Patel D., Pawlicki T., Cotrutz C., Presti J., King C. 2206 // International Journal of Radiation Oncology*Biology*Physics. — 2006. — Ноябрь (т. 66, № 3). — С. S324—S325. — ISSN 0360-3016. — doi:10.1016/j.ijrobp.2006.07.612.
- «Is CyberKnife Ready for Prime Time in Prostate Cancer?». WSJ. 28 November 2008.
- Gerszten P. C., Ozhasoglu C., Burton S. A., Vogel W. J., Atkins B. A., Kalnicki S., Welch W. C. CyberKnife frameless stereotactic radiosurgery for spinal lesions: clinical experience in 125 cases. (англ.) // Neurosurgery. — 2004. — Vol. 55, no. 1. — P. 89—98. — PMID 15214977.
- Liao J.J., Judson B., Davidson B., Amin A., Gagnon G., Harter K. CyberKnife Fractionated Stereotactic Radiosurgery for the Treatment of Primary and Recurrent Head and Neck Cancer // International Journal of Radiation Oncology*Biology*Physics. — 2005. — Октябрь (т. 63). — С. S381. — ISSN 0360-3016. — doi:10.1016/j.ijrobp.2005.07.650.
- Bhatnagar A. K., Gerszten P. C., Ozhasaglu C., Vogel W. J., Kalnicki S., Welch W. C., Burton S. A. CyberKnife Frameless Radiosurgery for the treatment of extracranial benign tumors. (англ.) // Technology in cancer research & treatment. — 2005. — Vol. 4, no. 5. — P. 571—576. — PMID 16173828.
- Thomas, Liz (21 July 2008) "Patrick Swayze smiling again after 'miracle' response to cancer treatment". Mail Online.
- О клинике - ГБУЗ "Челябинский областной клинический онкологический диспансер". www.chelonco.ru. Дата обращения: 12 октября 2018.
- Под «Кибернож» в Челябинской области легли уже десять пациентов. chelyabinsk.74.ru. Дата обращения: 12 октября 2018.
- Межрегиональный медицинский центр ранней диагностики и лечения онкологических заболеваний. www.oncoclinic.su. Дата обращения: 19 апреля 2019.
- Лечение на кибер-ноже. МИБС, Санкт-Петербург.. radiosurgery.ldc.ru. Дата обращения: 9 марта 2018.
- Информация о контракте № 0373100068212000379
Ссылки
- Новая альтернатива в лечении рака. Московский комсомолец. mk.ru (11 мая 2011). Дата обращения: 27 марта 2013. Архивировано 5 апреля 2013 года.
