Бистатический гидролокатор
Бистатический гидролокатор — гидролокатор, приёмник(и) и передатчик(и) которого разнесены в пространстве на расстояния, сравнимые с расстоянием до цели[1].
Сравнение бистатического и моностатического гидролокаторов
Потери распространения
В процессе распространения звука в среде, амплитуда звуковых колебаний уменьшается. Существуют три основных механизма потерь: сферическое (или цилиндрическое в мелкой воде) расхождение, поглощение и рассеяние звука неоднородностями среды. Потери распространения TL (англ. Transmission loss) зависит от расстояния и частоты звука. В моностатическом гидролокаторе звук вначале проходит путь от излучателя до цели, а затем обратно – от цели к приёмнику. Считая, что потери в одном направлении равны TL (в децибелах), полные потери звука составят 2·TL. В бистатическом гидролокаторе потери являются суммой потерь на пути от излучателя до цели TLPT и потерь на пути от цели к приёмнику TLTR[1].
Мёртвая зона
В моностатическом гидролокаторе сигнал излучателя, попадая в приёмник, маскирует отражённые от цели сигналы. Если длительность сигнала передатчика составляет τ, то моностатический гидролокатор не способен обнаруживать цели в радиусе менее сτ/2, где с — скорость распространения звука. Эта круговая область пространства называется «мёртвой зоной». Если гидролокатор находится в мелкой воде, радиус мёртвой зоны может быть больше, так как сильные отражённые сигналы могут создавать волны на поверхности воды и неоднородности дна[1].
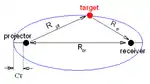
В бистатическом гидролокаторе приёмник находится на расстоянии RPR от излучателя, поэтому в течение времени t = RPR/c после зондирующего импульса сигнал вообще не поступает на приёмник. В момент времени t приёмник принимает «прямой сигнал» (англ. direct blast), который продолжается в течение времени сτ[2]. Таким образом, бистатический гидролокатор не способен различать цели внутри эллипса, границы которого соответствуют расстоянию R = RPR + cτ, а фокусами являются излучатель и приёмник. Отражения сигнала от близких к излучателю неоднородностей не влияют на мёртвую зону.
Диаграмма направленности отражения

Объекты никогда не отражают звук строго однонаправленно. Механизм отражения звука достаточно сложен, потому что отражающий объект в общем случае нельзя представить абсолютно жёсткой сферой. Амплитуда отражённого звука зависит от угла β (по отношению к локальной системе координат объекта), под которым объект облучается излучателем, и угла α, под которым отражённый звук идёт к приёмнику. Зависимость S(α, β) силы отражённого звука от этих углов называется диаграммой направленности отражения[1].
Направление максимального отражения зависит от формы объекта и его внутренней структуры. Поэтому не всегда угол оптимального облучения и угол максимального отражения совпадают. Ещё более сложной становится картина отражения, когда цель частично углублена в донные отложения (это характерно, например, для мин, утопленных контейнеров с отходами, затонувших кораблей и т.д.). В этом случае отражение зависит не только от свойств объекта, но и от взаимодействия волн с морским дном. Поэтому очень часто эффективны бистатические решения, когда цель облучается под различными углами, либо отражённый сигнал приниматеся с различных направлений.
Типы бистатических гидролокаторов
Гидролокаторы прямого и обратного рассеяния
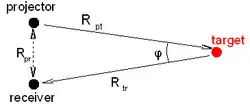
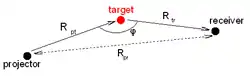
В моностатических гидролокаторах направление принимаемого отражённого сигнала строго противоположно направлению прадающего сигнала облучателя. В бистатических гидролокаторах угол φ между этими направлениями (т.н. «бистатический угол») может меняться от 0° до 180°. Отражение при φ < 90º называется обратным рассеянием, при φ > 90º — прямым рассеянием. Прямое рассеяние основано на принципе Бабине[1].
 Моностатический гидролокатор |
 Бистатический гидролокатор с обратным рассеянием |
 Бистатический гидролокатор с прямым рассеянием |
Псевдомоностатический гидролокатор
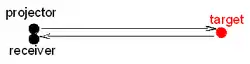
Псевдомоностатическим называется гидролокатор малым бистатическим углом. Другими словами, расстояние от излучателя до цели RPT и от цели до приёмника RTR значительно меньше, чем расстояние от излучателя до приёмника RPR[1].
Мультистатический гидролокатор
Мультистатическим называется гидролокатор, у которого несколько излучателей и/или приёмников[1].
Применение бистатических и мультистатических гидролокаторов
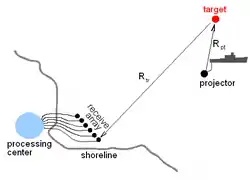
Дальнее наблюдение
Часто используют большие приёмные массивы гидрофонов, расположенных на прибрежном мелководье и соединённых кабелями с единым центром обработки информации. Чтобы обеспечить дальнее обнаружение целей, необходим мощный излучатель корабельного базирования. Чтобы снизить потери сигнала, излучатель должен находится как можно ближе к району, представляющему интерес[1].
 Дальнее наблюдение |
 Сеть приёмников с одним излучателем |
 Обнаружение захороненных объектов |
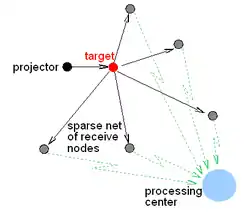
Сеть приёмников с одним излучателем
Район, представляющий интерес, обеспечиватеся большим количеством приёмников и одним мощным источником облучения. Приёмниками могут быть либо гидроакустические буи с передачей данных по радиоканалу, либо необитаемые подводные аппараты с акустической передачей данных[3]. Например, проект GOATS используем в качестве приёмных узлов необитаемые подводные аппараты[4]. Схожим образом устроена американская система LAMPS, где гидроакустические буи, сброшенные с вертолёта, передают данные на базовый корабль через ретранслятор, расположенный на вертолёте[1].
Низкочастотный буксируемый гидролокатор

Чем ниже частота сигнала, тем меньше потери, вызванные поглощением и рассеянием на неоднородностях среды. С другой стороны, чем ниже частота, тем больше должен быть размер направленного излучателя и приёмного массива[1]. Поскольку типичные размеры излучателей и приёмников исключают их размещение на одном корабле, такие гидролокаторы выполняются в виде массивов излучателей и приёмников, расположенных на длинном тросе, буксируемом вслед за кораблём. Примером может служить буксируемый гидролокатор LFATS[5].
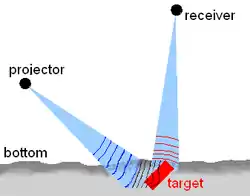
Обнаружение захороненных объектов
Чтобы обнаружить захороненные объекты, излучаемый акустический сигнал должен проникать вглубь грунта[1]. Это требует мощного и высоконаправленного излучателя. Этот излучатель должен размещаться в точке с наилучшими условиями отражения от объекта и окружающей поверхности дна. Наилучшим образом эта задача решается при помощи бистатического гидролокатора. Примером применения бистатического локатора в этой области служит проект SITAR, направленный на поиск затонувших мин и контейнеров с токсическими отходами[6].
Преимущества и недостатки бистатических гидролокаторов
К преимуществам бистатических гидролокаторов следует отнести[1]:
- Возможность надёжной маскировки приёмника;
- Снижение эффективности электронного противодействия, так как характеристики и положение приёмника неизвестны.
- Возможность увеличения эффективной поверхности отражения цели благодаря геометрическим эффектам.
- Меньшая стоимость приобретения и технического обслуживания (при использовании излучателя, принадлежащего сторонней организации);
- Отсутствие необходимости в лицензии на частотный диапазон (при использовании излучателя, принадлежащего сторонней организации);
К недостаткам бистатических гидролокаторов следует отнести:
- Сложность системы;
- Необходимость в специальных элементов передачи данных между элементами гидролокатора;
- Сложность развёртывания;
- Ограничения, связанные с необходимостью располагать приёмники в точках прямой видимости относительно источников.
- Отсутствие контроля за излучателем (при использовании излучателя, принадлежащего сторонней организации);
Примечания
- Все материалы данного раздела, кроме фрагментов, где источник указан особо, взяты из статьи Alexander Yakubovskiy Bistatic Sonar, explained. FarSounder Inc.
- Cox H. Fundamentals of Bistatic Active Sonar. In: «Underwater Acoustic Data Processing» by Y. T. Chan (editor). Springer, 1989.
- Xiaolong Yu Wireline Quality Wireless Communication Using High Speed Acoustic Modems. MTS/IEEE Oceans 2000, Volume 1, pp. 417-422
- Te-Chih Lui, Schmidt H. AUV-based seabed target detection and tracking. MTS/IEEE Oceans 2002, Volume 1, pp. 474-478
- P. K. Sengupta LFATS' Competitive Advantages for Undersea Warfare in Shallow Waters Архивная копия от 26 января 2011 на Wayback Machine. Force, June 2005, pp. 8-10.
- M. Cosci, A. Caiti, P. Blondel and N. Jasundre A potential algorithm for target classification in bistatic sonar geometries. In: "Boundary Influences in High Frequency, Shallow Water Acoustics", by N.G. Page and P. Blondel (editors), University of Bath, UK, 2005.
См. также
Ссылки
- N. K. Naluai et al. Bistatic applications of intensity processing. Journal of Acoustic Society of America, 2007, 121 (4), pp. 1909–1915
- J. R. Edwards, H. Schmidt and K. LePage Bistatic synthetic aperture target detection and imaging with an AUV, IEEE Journal of Oceanic Engineering, 2001, 26(4): pp. 690–699.
- I. Lucifredi and H. Schmidt Subcritical scattering from buried elastic shells. Journal of Acoustic Society of America, 2006, 120 (6), pp. 3566–3583, 2006.
- CAPTAS Nano. A new sonar for ASW in the littorals.
- Joris Janssen Lok Precision Array. New ASW System Lets Small Ships Target Stealth Subs. Defence Technology International, July 2007, p. 22.
- Thales Underwater Systems - Sonar Systems.
- J.I. Bowen and R.W. Mitnick A Multistatic Performance Prediction Methodology. Johns Hopkins APL Technical Digest, 1999, v.2, No 3, pp. 424–431