Ethernet powerlink
Ethernet Powerlink — протокол передачи данных реального времени для использования в сетях Ethernet, открыто стандартизованный группой Ethernet Powerlink Standardization Group (EPSG). Технология была разработана австрийской компанией B&R в 2001 году[1].
Обзор
Ethernet Powerlink расширяет стандарт Ethernet механизмами смешанного опроса и технологией time slicing.
- Гарантируется передача срочных данных в очень короткие изохронные интервалы с настраиваемым временем отклика
- Осуществляется высокоточная синхронизация времени для всех узлов в сети (точность порядка микросекунд)
- Передача некритичных данных, для которых не требуется гарантий реального времени, осуществляется в отдельном асинхронном канале
В современных реализациях длительность интервалов может быть менее 200 мкс, а джиттер (точность синхронизации) — менее 1 мкс.
Стандартизация
Powerlink был стандартизирован ассоциацией Ethernet Powerlink Standardization Group, основанной в июне 2003 года. Рабочие группы сосредоточили внимание на таких задачах, как безопасность, технологии, маркетинг, сертификация и конечные пользователи. EPSG сотрудничает с стандартизирующими организациями и ассоциациями, такими как CAN in Automation (CiA) и Международной электротехнической комиссией (IEC).
Физический уровень
Изначально протокол определялся для физического уровня на основе 100Base-TX (Fast Ethernet, 100 Мбит/с по витой паре). В конце 2006 года был разработан вариант Ethernet Powerlink для Gigabit Ethernet (1 Гбит/с).
В сетях Ethernet Powerlink (в сегменте сети, в котором требуется сеть реального времени) рекомендуется использовать концентраторы вместо коммутаторов для минимизации задержек и джиттера. Для проектирования сетей Ethernet Powerlink применяются руководства IAONA (Industrial Ethernet Planning and Installation Guide) в части прокладки кабелей. В качестве разъемов применяются как распространенные Ethernet-разъемы 8P8C (RJ45) так и М12.
Канальный уровень
Канальный уровень Ethernet расширяется дополнительным механизмом планирования обменов на шине. Вводятся выделенные промежутки времени, в которые доступ к шине разрешен только одному из устройств. Все время работы шины делится на изохронные и асинхронные фазы. Во время изохронной фазы передаются данные, критичные к времени доставки. Асинхронная фаза позволяет передавать значительные объёмы данных, для которых не требуются гарантии времени доставки. Управляющий узел (Managing Node, MN) распределяет времена доступа к среде путём рассылки специальных управляющих сообщений. В результате в каждый момент времени только один узел (называемый CN) имеет доступ к сети. Такая система управления позволяет избежать коллизий, которые могли происходить на более старых сетях Ethernet, использующих концентраторы, а не коммутаторы как в более современных сетях.
Ethernet Powerlink не использует алгоритм разрешения коллизий CSMA/CD, так как он приводил бы к недетерминированности времени доставки пакетов.
Основной цикл
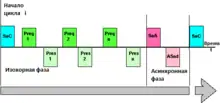

После запуска сети реального времени на базе Ethernet Powerlink начинают действовать гарантии на время доставки. Планирование основного цикла осуществляется управляющим узлом. Общая длительность цикла зависит от количества изохронных данных, асинхронных данных и количества узлов, опрашиваемых в каждом цикле.
Основной цикл состоит из следующих фаз:
- Начальная фаза (start phase): управляющий узел рассылает сообщение синхронизации на все узлы. Оно называется SoC (Start of Cycle — начало цикла) и имеет размер в один фрейм Ethernet.
- Изохронная фаза (isochronous phase): управляющий узел опрашивает каждый из узлов для передачи данных, критичных к времени доставки, отправляя запрос PREQ (poll request). Запрошенный узел отвечает пакетом PRES (poll response). Общая схема реализует алгоритм «производитель — потребитель»[уточнить]. Период времени, когда пересылаются сообщения PREQ-n и PRES-n для n-го узла, называется слотом для адресуемого узла.
- Асинхронная фаза (asynchronous phase): управляющий узел даёт одному из узлов право отправки асинхронных данных, посылая ему пакет SoA (Start of Asynchronous). Узел отвечает пакетом ASND. В этой фазе используется стандартный стек протоколов IP.
Конкретные гарантии реального времени зависят от точности выполнения основного цикла. Длины каждой из фаз могут варьироваться. Соотношение между изохронной и асинхронной фазами в определенных пределах может настраиваться.

В дополнение к передаче изохронных данных в каждом основном цикле может применяться режим мультиплексирования, когда некоторые узлы могут делиться своими слотами для повышения скорости передачи данных.
В робототехнике и крупных системах используется также специальная техника сцепления откликов (poll response chaining).
Примечания
- Несмотря на сходство названия, этот протокол не относится к передаче электроэнергии через Ethernet-кабели (технологии Power over Ethernet, PoE) и связи через электропроводку
Литература
- Machine safety Tactical brief (PDF) (недоступная ссылка). Automation World (2012). Дата обращения: 23 декабря 2012. Архивировано 7 сентября 2012 года.
- Humphrey, David openSAFETY Initiative Aims to Unify Industrial Safety Protocols. ARC Advisory Group (2012). Архивировано 17 августа 2012 года.
- POWERLINK Awarded National Standard in China (недоступная ссылка) (2012). Дата обращения: 23 декабря 2012. Архивировано 19 января 2013 года.
- DDASCA Consortium defines openSAFETY as standard (2012).
- F.Zezulka, O.Hyncica. Průmyslový Ethernet VIII: Ethernet Powerlink, Profinet (неопр.) // Automa. — 2008. — Т. 5. — С. 62—66.
- Which Ethernet system is the right one?. Control Engineering Europe (2009).