Digital Command Control
Digital Command Control (DCC) — стандарт (протокол) цифрового управления моделями железных дорог. Если модели локомотивов и железная дорога поддерживает Digital Command Control и оснащена соответствующими декодерами, то локомотивы, находящиеся на одном участке пути, могут управляться независимо.
Идея DCC схожа с системами PowerLine, где шина питания и шина данных совмещены.
Протокол DCC создан рабочей группой американской Национальной ассоциации моделей железных дорог (Digital Command Control Working group of the National Model Railroad Association (NMRA)). Термин «DCC» является торговой маркой NMRA, как и термин «Digital Command Control», иногда использующийся для объяснения любой системы цифрового управления моделей железных дорог.
Как устроен DCC

Идея DCC схожа с системами PowerLine, где шина питания и шина данных совмещена в одну.
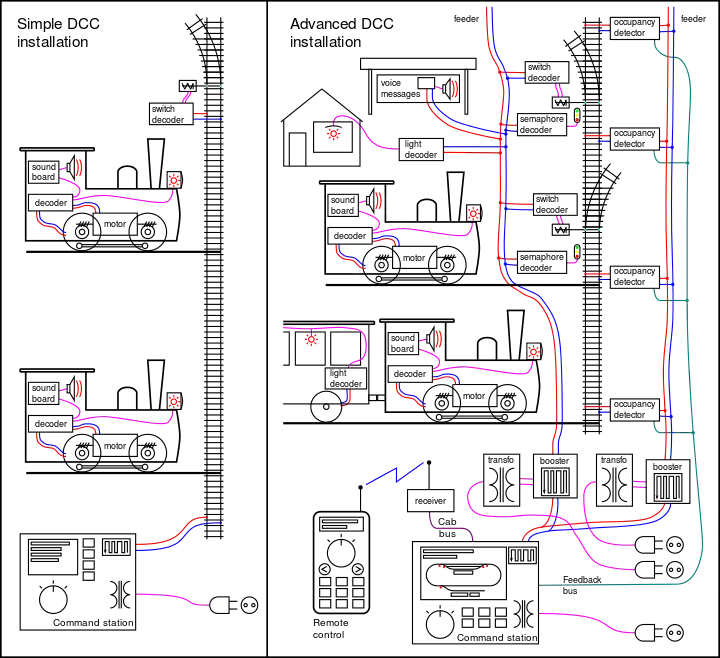
На рельсы подается напряжение питания — биполярный сигнал постоянного тока.
Станция DCC в паре с её усилителем (бустером) на короткое время меняют полярность источника питания, а затем возвращают обратно, тем самым сигнал представляет собой последовательность импульсов. Кодирование логической единицы и логического нуля происходит по разнице промежутка времени инверсии: логическая единица по длительности равна примерно 57,5(допуск+-1,5) микросекундам, логический ноль длиннее — минимум 98 мкс(допустимый максимум - 9,9 миллисекунд). Пауза между сигналами в пакете равна продолжительности инверсии. Тем самым инверсия длится полцикла. Между посылками команд, некоторые станции умеют делать паузы, для ответа локомотивов - таким образом станция может "узнать" локомотив на конкретном блок-участке, но это требует более дорогих модулей детекторов занятости и декодеров локомотива, умеющих отвечать в одном стандарте.
Каждый локомотив оснащен декодером, который принимает этот сигнал с пути и, после декодирования, подает напряжение на двигатель локомотива в случае правильного запроса. Каждому декодеру выдается индивидуальный адрес, и он не отреагирует на команду, предназначенную другому локомотиву. Это позволяет независимо управлять локомотивами в любом месте макета без специальных технических ухищрений. Декодер также позволяет управлять неходовыми функциями: светом прожектора и буферных фонарей локомотива, дымо- и звукогенераторами, приводами сцепок и других устройств (например, подъёмом пантографа). Такие специфические функции могут управляться удаленно с контроллера DCC. Система также позволяет управлять таким же методом переводом стрелок, сигналами светофоров и семафоров, другим станционными элементами (в том числе шлагбаумами), а также иллюминацией, если это предусмотрено моделью железной дороги.
Так как производителей DCC много, протоколы управления у них отличаются, и в зависимости от базовой станции управление локомотивами может быть ограниченное, либо вообще некоторыми декодорами сигнал не будет восприниматься.
История и протоколы
Системы «digital command control» были спроектированы немецкой компанией «Lenz Elektronik GmbH» в 1980-х годах для двух фабрик, выпускавших модели локомотивов, «Märklin» и «Arnold». Первый цифровой декодер, произведённый «Lenz», вышел на рынок в 1989 году для моделей Arnold (типоразмера N) и в середине 1990 г. для «Märklin» (типоразмеров Z, H0 и 1). «Lenz» продолжили модернизировать систему.
Протокол DCC состоит из двух стандартов, опубликованных Национальной Ассоциацией Моделей Железных Дорог : S-9.1 определяющий стандарты электро-питания, и S-9.2 определяющий стандарт связи.
Преимущества

Главное преимущество в сравнении с аналоговой системой управления — это независимое индивидуальное управление каждым локомотивом вне зависимости от его местонахождения на макете. В аналоговых системах для независимого управления несколькими локомотивами путь разбивается на электрически изолированные участки, управляемые с разных пультов.
Также командная система, управляющая всеми моделями и устройствами макета по одной шине, позволяет существенно упростить схему электрической проводки макета.
Для большей реалистичности движения моделей декодеры часто умеют имитировать инерцию, плавно ускоряя или замедляя локомотив при получении команд на изменение скорости. Многие декодеры поддерживают сохранение состояния и движение с определенной постоянной скоростью. За счет этого контроллеры позволяют задать скорость движения локомотива, отключиться от него и переключиться на управление другим, при этом первый будет продолжать движение с установленной скоростью.
Использование звукогенераторов практикуется во всё меньших моделях, вплоть до масштаба N.
Схема принципов работы
Конкурирующие компании
В Европе актуален открытый стандарт NEM — Selectrix, но правообладателем систем является «Märklin Digital».
Из США пришла система Rail-Lynx, в которой питание передаётся по рельсам, а для передачи команд использует ИК-излучение.
Несколько лидирующих компаний по производству моделей (включая Roco, Hornby и Bachmann) ввели свою версию протокола DCC на рынок, на котором специализируются теперь Lenz, Digitrax, ESU, ZIMO, Kühn, Tams, North Coast Engineering (NCE), CVP Products, EasyDCC, Sound Traxx, Lok Sound, Train Control Systems). Большинство систем в настоящий момент поддерживает несколько протоколов.