Скольжение асинхронного двигателя
Скольжение асинхронного двигателя — относительная разность скоростей вращения ротора и изменения переменного магнитного потока, создаваемого обмотками статора двигателя переменного тока. Скольжение может измеряться в относительных единицах и в процентах.
,

где — скорость вращения ротора асинхронного двигателя, об/мин

— скорость циклического изменения магнитного потока статора, называется синхронной скоростью двигателя.

,

где f — частота сети переменного тока, Гц
p — число пар полюсов обмотки статора (число пар катушек на фазу).
Из последней формулы видно, что скорость вращения двигателя n практически определяется значением его синхронной скорости, а последняя при стандартной частоте 50 Гц зависит от числа пар полюсов: при одной паре полюсов — 3000 об/мин, при двух парах — 1500 об/мин, при трёх парах — 1000 об/мин и т. д.
Режим холостого хода
Холостой ход асинхронного двигателя подразумевает отсутствие на валу нагрузки в виде рабочего органа или редуктора. В режиме холостого хода скольжение составляет
- .

В режиме холостого хода ротор вращается с частотой лишь немного меньшей синхронной частоты вращения и скольжение весьма мало отличается от нуля.
Следует заметить, что так же существует режим идеального холостого хода, при котором , что практически реализовать невозможно, даже если учесть отсутствие силы трения в подшипниках. Сам принцип работы двигателя подразумевает отставание ротора от вращающегося магнитного поля статора. При поле статора не пересекает обмотки ротора и не может индуцировать в нём ток, а значит не создаётся магнитное поле ротора


Генераторный режим
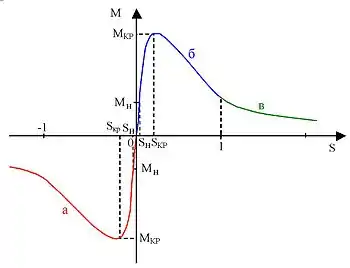
Если обмотку статора включить в сеть, а ротор посредством приводного двигателя вращать в направлении вращения магнитного поля с частотой , то направление движения ротора относительно поля статора изменится на обратное (по сравнению с двигательным режимом), так как ротор будет обгонять поле статора. При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора изменит свое направление. Таким образом, в генераторном режиме скольжение может изменяться в диапазоне , то есть оно может принимать любые отрицательные значения.


Режим торможения противовключением
В режиме электромагнитного торможения частота вращения ротора является отрицательной, поэтому скольжение принимает положительные значения больше единицы

Таким образом, скольжение в режиме торможения противовключением может изменяться в диапазоне .

Критическое скольжение
Если постепенно повышать нагрузку двигателя, то скольжение будет расти (ротор будет все сильнее отставать от вращающегося магнитного поля), при этом пропорционально скольжению будет расти ток, наводимый в роторе, а пропорционально ему будет расти и момент. Поэтому при малых нагрузках можно считать, что момент пропорционален скольжению. Но при росте скольжения возрастают активные потери в роторе, которые снижают ток ротора, поэтому момент растет медленнее чем скольжение, и при определенном скольжении момент достигает максимума, а потом начинает снижаться. Скольжение, при котором момент достигает максимума, называется критическим.
Литература
- Хомяков Н. М., Денисов В. В., Панов В. А. Электротехника и электрооборудование судов. — Ленинград: Издательство «Судостроение», 1971. — 368 с.